三轴惯性传感器ADISl6355在姿态检测中的应用

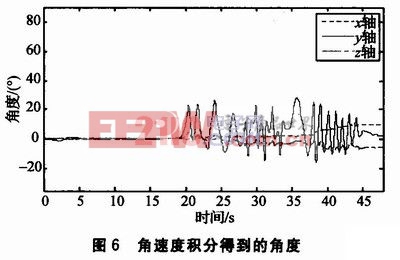
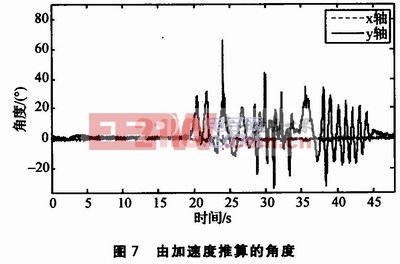
对角速度进行积分得到飞行器的三个姿态角,如图6所示。通过式(3)由加速度信息推算的两个角度如图7所示。对比图6和图7可知,由角速度积分得到的角度最终不是静止时的0°。原因是陀螺存在漂移,随着时间的积累,测量的误差会在积分中一直累加,而由加速度信息推算出来的角度就不存在漂移。图7中约第24 s时,y轴角度出现一个峰值(高达70°),而实际的旋转角度只在±30°之间,其原因是振动引起加速度值突增,导致推算出的角度过大。本文引用地址:https://www.eepw.com.cn/article/162642.htm
结语
实际使用中,加速度计对振动非常敏感,应根据应用的场合对加速度数据进行处理。四轴飞行器具有4个无刷电机,实际飞行时电机引起的振动非常大,如果简单地通过加速度来推算角度就会出现很多图7中第24 s的尖点,与实际情况不符合。可以通过对加速度进行均值滤波得到改善。对陀螺角速度的积分可利用加速度推算出的角度值进行修正。
本文使用STM32F103VB单片机对惯性测量传感器ADISl6355进行数据采集,并通过无线数据传输模块把数据发送回计算机。利用ADISl6355对四轴飞行器姿态进行检测,可分别利用角速度信息和加速度信息对飞行器姿态进行估计,两种方法各有优缺点,在实际使用时要综合进行考虑。

传感器相关文章:传感器工作原理
风速传感器相关文章:风速传感器原理 称重传感器相关文章:称重传感器原理 加速度计相关文章:加速度计原理










评论