三轴惯性传感器ADISl6355在姿态检测中的应用

2.3 电源模块
电源模块主要为STM32F103VB、ADISl6355和无线数据传输模块供电,其电路设计如图4所示。锂电池提供的11.1 V电源经ASMlll7-5.O转换为5 V,再经过ASMlll7-3.3转换为3.3 V。其中,5 V为ADISl6355提供电源,3.3 V为STM32F103VB和无线数据传输模块提供电源。Dl是用于电源指示的LED,Rl为O.5 A可恢复保险。本文引用地址:https://www.eepw.com.cn/article/162642.htm
为加速度计测得的加速度,通过式(2)可推算得到俯仰角和横滚角如下:
![]()
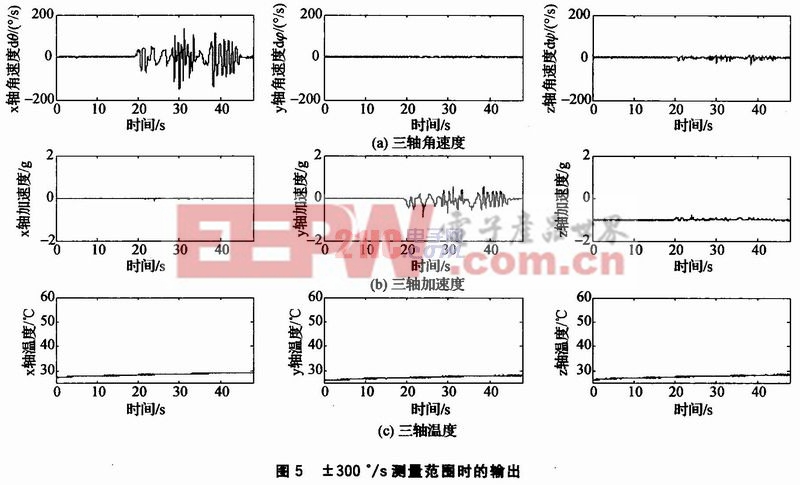
配置陀螺的测量范围为±300°/s,1 min内测得的ADISl6355三个轴的角速度、加速度和温度曲线如图5所示。在约19 s时使飞行器绕x轴进行滚转运动,在约45 s时使飞行器恢复到刚开始的静止状态。由图5可知,静止时角速度的输出范围为±2°/s,x、y轴加速度计的输出范围为±O.015 g,温度由26℃到30℃逐步上升。若把陀螺的测量范围配置为±75°/s,静止时的角速度输出范围为±l°/s,但很容易超出±75°/s的范围,因此±75°/s的测量范围不适用于四轴飞行器姿态检测。

传感器相关文章:传感器工作原理
风速传感器相关文章:风速传感器原理 称重传感器相关文章:称重传感器原理 加速度计相关文章:加速度计原理










评论