振动筒式压力传感器的FLANN非线性校正

3 函数链神经网络的建模
采用函数链神经网络进行振动筒式压力传感器校正的模型如图2所示。
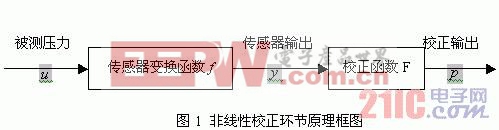
图2 函数链神经网络模型图
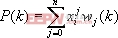
图中:,为训练样本的输入元素它对应式(1)中的1,u,u2,u3,…,un;Wj(j=0,1,2,…,n)为网络的连接权,它用来确定式(1)中的待定系数a0,a1,a2,…,a n;di为传感器的标定周期(频率的倒数)值。在该神经网络中,每个神经元都采用线性函数,因此函数链神经网络的输出为:
 (2)
(2)
式中:P(k)为第k步时,di的估计值,它与di比较,得到第k步的估计误差:
 (3)
(3)
然后根据式(4)调节神经网络的连接权值:
 (4)
(4)
式中:wj(k+1)为第k步时,第j个连接权值,是学习因子。在进行神经网络算法之前,先通过振动筒标定实验获得多组输入输出标定值对(Xi,di),Xi为压力值。标定点要分布在整个测量范围之内。另外还要对Xi进行归一化到[-1,+1],即xi=Xi / Xmax,Xmax为Xi的最大绝对值。其整个算法过程如下:
(1) 确定函数链神经网络结构。
(2) 网络连接权值初始化,随即设定wj,一般wj的初始值取[-1,1]之间的随机数。
(3) 输入训练数据样本xi,di。
(4) 由式(2)计算P(k)
(5) 由式(3)计算误差ei( k )。如果误差满足要求则转到(7),否则继续。
(6) 由式(4)修正wj(k),调节权值,返回(4)。
(7) 误差ei( k )达到最小,学习过程结束。得到最终的权值w0,w1,…,wn。
学习过程中还要注意学习因子的取值,它的选择会影响到迭代稳定性和收敛速度。大则收敛速度快,但稳定性不好;反之,则稳定性好,但是收敛速度慢。
4振动筒压力传感器的非线性校正
对飞行器进行气压检测是航空部门必不可少的,气压的检测一般都是采用的振动筒式压力传感器。表1是以某振动筒压力传感器对飞行器气压在温度为20℃时的部分压力标定值,将它们归一化后作为神经网络的输入样本数据。在训练时对应某个温度值就有相应的25个样本数据,在训练中分别选取了温度为-40℃、-20℃、-10℃、0℃、10℃、40℃、60℃等不同范围进行训练学习。












评论