基于CNG地下储气井检测用的自动悬浮式超声波探头设计

1.2 探头系统工作原理
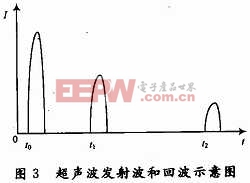
由结构知:超声波探头固定于径向导轨的精细丝杆上(对称的两只),图中只画出了一只。因前面有最大位置限制销,只可沿导轨作径向运动。其运动受径向电机控制,当旋转开始时,径向电机将探头送出。设超声波接收探头接收到的波形如图3所示,t=t0时,发射超声波;t=t1时是遇到管内壁时,由于润滑液与钢管的波阻抗不同而形成的反射回波;t=t2时,遇到管外壁的反射回波,对径向电机的控制信号是t=t1的反射回波。设超声波在润滑液中速度为v,润滑液厚为e,则:

接收探头将探头离管壁距离信息送入单片机处理后,控制径向电机的运动,当探头离管壁距离为e时(设计值),径向电机停止转动。只要探头离管壁距离偏离设计值e,径向电机都会运动,使探头离管壁距离保持设计值e不变。本文引用地址:https://www.eepw.com.cn/article/162487.htm
1. 3 供液系统结构及工作原理
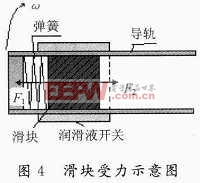
当探头未旋转时,离心力润滑液开关中的滑块受弹簧力F2作用,方向指向圆心,如图4所示,离心力开关关断,无润滑液输出。设滑块质量为m,转动半径为R,当探头旋转时,受惯性离心力F1作用(分析中忽略了滑块所受摩擦力的影响)。
当达到额定转速时,弹簧被压缩x,此时弹力F2为:
设计中使F1=F2时,离心力润滑液开关被完全打开,有最多的润滑液流入探头与管壁之间形成厚为e的簿膜,起到润滑和超声波的有效传递作用。
2 自动悬浮式超声波探头控制电路设计
2.1 控制系统硬件组成
2.1.1 系统硬件组成的方案
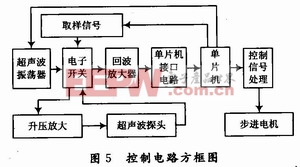
系统硬件组成的方案如图5所示。
2.1.2 各功能块作用
取样信号:工作频率为12.5 kHz的方波信号,控制电子开关的工作。
超声波振荡器:由单片机输出的具有一定幅度的,频率为O.5 MHz的超声波等幅信号。
电子开关:在1/10周期内关闭回波通道,而将超声波振荡信号送入超声波探头(进入探头的是超声波脉冲);当超声波振荡信号通道关闭时,将超声波回波通道接通,将回波信号送入回波放大电路。
超声波探头:电声转换和声电转换器件。
回波放大器:将反射回的微弱回波信号进行放大,使其具有一定幅度。
单片机接口:将回波放大器放大的模拟信号进行模拟一数字转换,使其符合单片机输入的要求。
单片机:对输入的信号进行转换、计算、处理、控制等操作,输出控制信号。
控制电路:对单片机输出信号进行处理。
步进电机:带动涡轮涡杆使探头与管壁保持恒定距离。










评论