基于单轮车辆悬架的Fuzzy-PID控制器设计和仿真

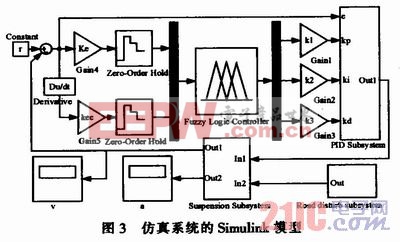
模糊推理器结合常规PID控制器组成Fuzzy—PID控制器,将单轮悬架子系统、路面随机激励子系统和Fuzzy-PID控制器进行组合,得到整个仿真系统的Simulink模型如图3所示。本文引用地址:https://www.eepw.com.cn/article/162108.htm
3 仿真试验
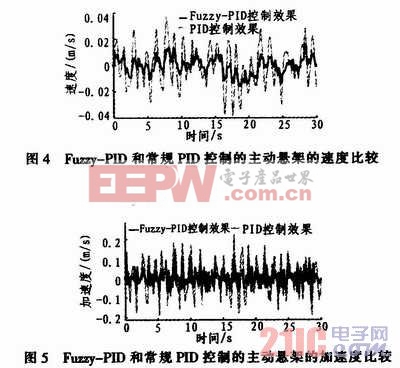
Simulink搭建的模型中,车身质量m1=2 500 kg,悬架质量m2=320 kg,悬架弹簧的弹性系数k1=80 000 N/m,阻尼系数b1=350 Ns/m,模拟轮胎的弹簧弹性系数k2=500 000 N/m,阻尼系数k2=15 020 Ns/m,假定汽车在B级路面上,以20 m/s的速度行驶。分别对采用常规PID控制的主动悬架和采用Fuzzy—PID控制的主动悬架的进行仿真,仿真结果如图4和图5所示。
3.1 结果分析
仿真结果表明采用PID控制器的主动悬架可以改善汽车的行驶平顺性,而当采用Fuzzy—PID控制器时,控制效果可以进一步提高。采用Fuzzy—PID控制的主动悬架,无论是车身的速度还是加速度均比被动悬架和采用常规PID控制的主动悬架有很大降低,优势十分明显。
4 结束语
本文研究车辆主动空气悬架的控制问题,在车辆主动空气悬的常规PID控制器的基础上,运用模糊推理对常规PID控制器进行参数在线修订,设计了基于单轮车辆主动空气悬架的Fuzzy-PID控制器,并对Fuzzy-PID控制的单轮车辆主动空气悬架进行Matlab建模和仿真试验。仿真结果表明,与车辆被动空气悬架、常规PID控制的车辆主动空气悬架相比,Fuzzy—PID控制的车辆主动空气悬架可大大降低车身加速度和悬架动行程,提高车辆乘坐舒适性和操纵稳定性,具有良好的鲁棒性,从而验证了Fuzzy—PID控制器的有效性和实用性。

pid控制器相关文章:pid控制器原理










评论