一种新的模糊PID控制在电机软启动中的仿真

2 控制系统设计
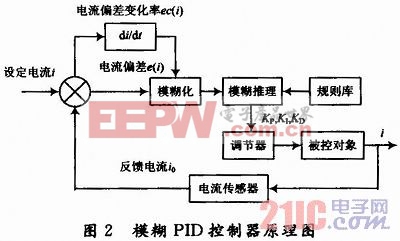
人们运用模糊数学的基本理论和方法,把规则的条件和操作用模糊集表示,并把这些模糊控制规则及有关信息作为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况,运用模糊推理,即可自动实现对PID参数的最佳调整,这就是模糊PID控制。模糊PID控制器以误差e和误差变化率ec作为输入,利用模糊控制规则在线对PID的3个参数进行调整,以满足不同时刻的e和ec对PID参数自整定的要求。模糊PID控制器的基本结构如图2所示。在交流电机软启动的过程中,通过检测启动电流i设定值的偏差,以及偏差的变化率,这两种检测信号作为模糊PID控制器的两个输入,分别用e(kt),ec(kt)表示,输出为KP,KI,KD,再通过反模糊化,经过调节器输出控制晶闸管的导通角,调整电压的输出,进而达到电机平稳软启动的要求。本文引用地址:https://www.eepw.com.cn/article/161571.htm
(1)模糊化
在电机软启动控制器系统中设计模糊PID控制器时,采用双输入/三输出模式的Fuzzy控制器结构。分别用e(kT),ec(kT)表示,输出为KP,KI,KD。为了方便描述,定义如下:

式中:T为采样时间;I(kT)为启动电流给定值;I0(kT)为第k个采样时刻的电流输出。

pid控制器相关文章:pid控制器原理
三相异步电动机相关文章:三相异步电动机原理




评论