无线传感器网络基于分簇路由的数据融合研究

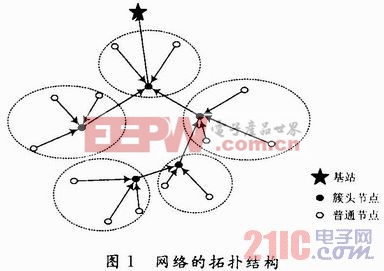
具体实现方法是在分簇过程完成之后,簇头节点相互发送探测信息包,和基站形成反向组播树,该树的形成算法主要基于DDSP,在保证与基站路径最短的前提下,选择与已计算的目的簇头最近的路径,通过目的簇头之间共享尽可能长的路径来降低生成树的能量消耗。反向组播树形成之后,数据融合过程不仅能在簇头处理簇内节点传送来的数据时实现,也能在簇头之间通过反向组播树向基站发送数据时实现,让数据采集效率更高,同时避免了过远的簇头直接向基站发送数据时产生过高的能耗,此时网络的拓扑结构如图1所示。本文引用地址:https://www.eepw.com.cn/article/160520.htm
2.3 数据融合策略
无线传感器网络的数据融合不仅仅是对数据进行简单的平均、求和等运算,根据具体需求,需要采取不同的融合措施,数据融合的顺序一般是从数据层到特征层再到决策层。本协议应用信息熵进行数据分类融合,节点感知的各种信息的数据关系可通过信息熵的计算分为补充数据、冗余数据以及冲突数据。补充数据指传感器节点感知的目标不同特征的信息;冗余数据指传感器节点感知的目标同一特征的信息;冲突数据指传感器节点感知的不同目标的信息或者是同一目标时空不相关的信息,或者是传感器故障而提供的矛盾信息。判定两个传感器节点提供的信息的数据关系方法如下:
假定节点1与节点2感知数据的分布特性符合pi(x/xi),其中i为传感器号1或2,x(x∈X)为感知的随机数,xi为节点i感知的数据值;节点i和节点j的联合分布为pij(x/xi,xj),由信息熵的定义,节点i和j感知数据的自熵hi(xi)与联合熵hij(xi,xj)的计算如下:

自熵表明了节点i感知数据xi的不确定性,而互熵则表明了节点i和j联合感知数据(xi,xj)的不确定性。比较hi(xi),hj(xj)与hij(xi,xj)三者的大小关系有以下三种情况:
(1)hi(xi)≤hij(xi,xj)≤hj(xj),说明两个传感器的联合感知数据既没减少xi的不确定性,也没增加xj的不确定性,两个节点的感知数据互不影响,因此两个数据是互补的;
(2)hij(xi,xj)hi(xi)≤hj(xj),说明联合感知数据的不确定性较xi和xj的不确定性都小,因此两个数据是冗余的;
(3)hi(xi)≤hj(xj)hij(xi,xj),说明联合感知数据的不确定性较xi和xj的不确定性都大,因此两个数据是冲突的。
3 仿真实验
本文采用Matlab建立仿真模型,分别对原LEACH算法与改进后的算法进行仿真分析并加以比较。
3.1 仿真模型与参数设置
本实验采用LEACH定义的物理模型,其定义如下:
(1)所有节点属性完全一样,能量有限并且均能与基站直接通信;
(2)基站位置固定,节点不知道其自身位置信息;
(3)无线通信采用对称的信道,消耗的能量与传输的方向无关,节点可根据与目标节点的距离来调节射频发射功率;
(4)簇头节点可执行数据融合。












评论