2 系统软件设计
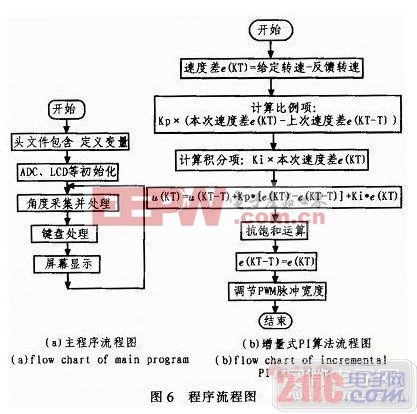
系统软件主要由主程序及各子程序完成。在主程序模块中,需要完成对各参量和接口的初始化、PCA模块初始化、液晶屏初始化以及角度采集、键盘扫描、主循环等工作。主程序流程图如图6(a)所示。在风扇速度控制中,本系统采用增量式PI算法,具体流程图如图6(b)所示。
3 结论
文中设计的帆板控制系统能够较好地完成帆板角度测量及控制任务。其中STC12C5A60S2单片机非常适合高职学生单片机入门学习,同时,该系统角度闭环PID控制系统能快速、准确的实现角度的调节,整个系统运行稳定,人机交互界面设计友好,且所用器件少,电路简单,性价比高。
倾角传感器相关文章:倾角传感器原理












评论