基于矩角控制的PMSM伺服系统仿真与设计

4 仿真与实验结果
4.1 仿真结果
电动机在高速运行时,由于转动部分具有相当大的动能,起动和制动都需要一定的加速和减速时间。步进传动的突跳过程就需要一定的升速时间,在这段时间内,θ逐渐增大,转子转速逐渐升高,只要在转子转速升高到等于步进磁动势的平均转速时,电动机的动态角误差还没有达到允许的最大值,电动机就不会失步。
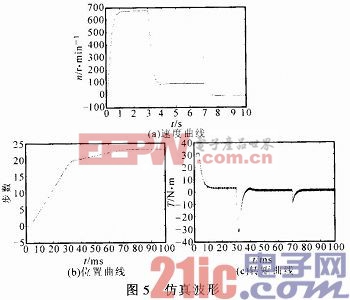
在步进运动中,定子电流矢量的运行角度为θs,平均角频率为ω1,转子运行的角度为θr,角频率为ω,T与θ有关,而θ=θs-0r。只要能保证θ总小于允许的最大值,θs既可以恒定的角频率增加,也可以变化的角频率增加,前者ω1恒定,属于恒频控制;而后者ω1变化,属于升降频控制。升降频控制下速度、位置及转矩仿真曲线如图5所示。本文引用地址:https://www.eepw.com.cn/article/159425.htm
4.2 实验结果
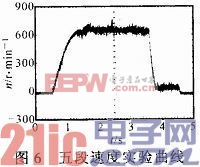
为获得较大的起动、制动转矩,给电机输入不同的电流矢量。在第1,3阶段,输入两倍额定电流,使电机具有很大的加速度,在尽量短的时间内达到下一阶段,在其他阶段输入额定电流。
第1阶段为升速过程,给定子超前转子3步的电流矢量并通以大的电流矢量,使电机以最大加速度加速,并在最短时间内达到恒定转速;第2阶段为恒转速运行阶段,将电机的速度控制在一恒定值。当转速低于设定转速时,给定子加超前的电流矢量;当速度高于设定转速时,给定子加滞后的电流矢量,这样就能尽量使电机速度控制在恒定转速;第3阶段为减速阶段,电机定子的给定电流滞后3步转子的电流矢量,这样电机以最大加速度进行降速,当电机运行到设定的脉冲数后,电机将进入低速运行阶段;第4阶段为低速运行阶段。此阶段运行速度较低,主要作用是为了减小电机惯性,实现电机最后一个阶段的精确定位;第5阶段为制动定位阶段,当电机转速趋近于零时,为保证定位的精确,令定子磁动势的位置保持在设定的目标位置上,此时产生复位转矩Tx,Tx将力图迫使转子回到提前设定的位置上,从而实现电机的定位控制。五段速度实验曲线如图6所示。
5 结论
通过对矩角控制下PMSM伺服控制系统的仿真和实验可知,运用矩角控制理论的PMSM伺服系统具有良好的动态特性与定位特性,完全可以
满足现实中对于速度以及定位精度的高要求,同时对于PMSM在高性能控制场合下的应用打下坚实的理论与实验基础。










评论