GEO卫星轨道倾角变大后天线跟踪方法研究

通过进一步研究分析和试验,发现问题是由于GEO 卫星轨道倾角变大后,卫星轨道倾角超出了静止轨道卫星正常工作时设计指标要求, 因此研究中需将卫星看作非静止轨道卫星, 在此前提下研究天线指向计算方法。
设φe 为天线俯仰角, φa 为天线方位角,其计算公式为:
利用此公式解算获得天线的指向数据跟实际天线指向数据进行比较,所得数据精度为0. 01°,满足使用要求。
此公式中,由于要使用到卫星的星下点经维度,首先要利用坐标转换将卫星星历数据XYZ 转换成BLH 坐标。计算公式如下:
式中, N 为椭球面卯酉圈的曲率半径; e 为椭球的第一偏心率; a 、b 为椭球的长短半径; f 为椭球扁率;W 为第一辅助系数。
3 天线跟踪策略
天线跟踪策略主要研究天线指向调整指令的发送时机。步进跟踪方式中调整的判别依据有2 个:
一是预先设定跟踪频度,当达到设定的时间节点时,进行步进式跟踪; 二是当AGC 电平低于门限值时,进行步进式跟踪。由于GEO 卫星相对地球静止,在一段时间内偏离角度较小,因而设置30 min 的频度就能较好地保证天线对卫星的跟踪。AGC 电压在轨道倾角较小的情况下具有相对平稳性,卫星倾角变大后波动较大, 造成系统频繁启动步进跟踪,30 min的频度间隔已不能满足系统稳定工作的要求,且13 m 桁架式天线频繁跟踪卫星会加大天线的磨损,降低天线使用寿命。因此,频度设置需要考虑天线调整次数与系统稳定性之间的矛盾。调整过于频繁,则会加大桁架式天线的磨损;若调整时间间隔过大,则影响系统参数的稳定性,系统不能稳定工作,为了解决这一矛盾,提出采用程序跟踪、档位和控制频度相结合的控制模式。档位的含义是: ,其其中ΔAZ 为方位角的计算值与实际值的差值,ΔEL 为俯仰角的计算值与实际值的差值。档位与天线波束偏离卫星可接受的偏差角度有关,即与天线波束偏离卫星所造成的卫星接收功率下降的可接受程度有关。依据该天线特性,天线的3 dB 半波束宽度为0112°,2 dB 半波束宽度为0110°,1 dB 半波束宽度为0108°。如果将门限θ设置为0112°、0110°或0108°,卫星接收上行功率对应下降3 dB、2 dB、1 dB。控制频度是天线调整的时间间隔,根据不同卫星的状态确定不同的控制频度,并通过试验找到最佳的控制频度。
,其其中ΔAZ 为方位角的计算值与实际值的差值,ΔEL 为俯仰角的计算值与实际值的差值。档位与天线波束偏离卫星可接受的偏差角度有关,即与天线波束偏离卫星所造成的卫星接收功率下降的可接受程度有关。依据该天线特性,天线的3 dB 半波束宽度为0112°,2 dB 半波束宽度为0110°,1 dB 半波束宽度为0108°。如果将门限θ设置为0112°、0110°或0108°,卫星接收上行功率对应下降3 dB、2 dB、1 dB。控制频度是天线调整的时间间隔,根据不同卫星的状态确定不同的控制频度,并通过试验找到最佳的控制频度。
在跟踪过程中,天线的实时指向数据将通过网络反馈到控制软件,与解算出的天线指向数据进行档位的计算,结合频度形成控制策略。控制流程如图2 所示。
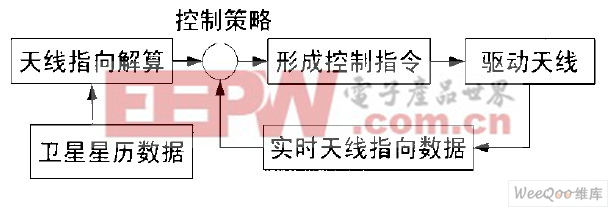
图2 程序跟踪控制流程
根据以上分析,采用0. 08°、0. 10°、0. 12°3 个档位进行跟踪试验,则天线的调整频度最快分别为10 min/ 次、13 min/ 次、15 min/ 次,为减少对天线的磨损,选取0. 15°、0. 12°两个档位进行试验。
(1) 档位为0. 15°
卫星螺流值最大为3. 24 mA ,最小为1. 1 mA。另一个通道螺流值最大为3. 75 mA ,最小为1. 00 mA。
卫星由北向南过赤道时螺流变化率最大,天线调整频度为16 min/ 次。试验期间螺流变化示意图如图3所示。
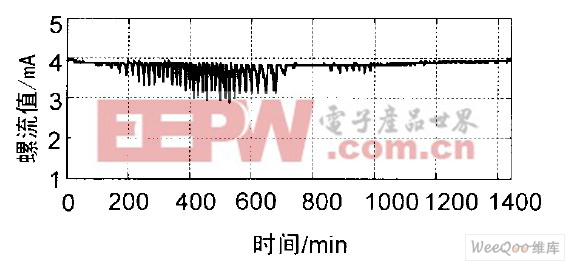
图3 档位0. 15°时螺流一天内变化图





评论