基于DSP的光纤光栅解调系统的设计

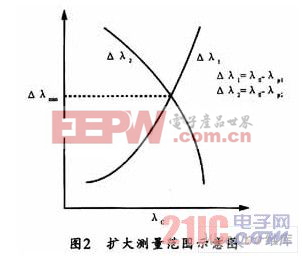
普通的匹配法只有一个传感光栅一个匹配光栅,对应只有一个△λ。当该△λ≥△λmin时,解调系统将无法继续解调。对于双光栅匹配解调系统,传感光栅与两个并联的匹配光栅的中心波长近似相等,但略有差别。三者关系为:λp1λcλp2,λp1和λp2分别表示两个匹配光栅的中心波长。λc是传感光栅的中心波长。传感光栅在外界应力作用下时,△λ1=?λc-λp1?,△λ2=?λc-λp2?;当λc增大时△λ1增大,△λ2减小;当λc减小时,△λ1减小,△λ2增大。图2所示为△λ1、△λ2和λc三者的关系图,其中△λmin是光电探测器可以探测到的最小值。因此,根据图 2可知,在理论上,双光栅匹配解调系统总是至少有一个光电探测器可以探测到可用光信号。
2 基于DSP的解调系统设计
2.1 系统硬件设计
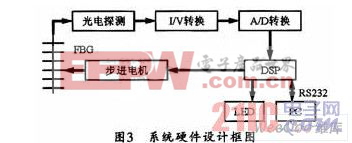
匹配光栅反射回来的光入射到光电探测器(PD)上可转换为电信号。光电转换部分和信号采集部分主要完成对PD输出电信号的采集,采集到的信号再转化为数字信号由DSP进行处理。DSP主要完成数据的插值运算和寻峰处理,并根据处理结果反馈给DSP,由DSP依照反馈信号控制步进电机完成下一步的解调工作,其系统硬件框图如图3所示。
为了实现高精度的数据采样,本系统选用美国AD公司推出的一种12位带并行微机接口的逐次逼近型模/数转换芯片AD1*来实现系统的模数转换,AD1*内部自带采样保持器(SHA)、10V基准电压源、时钟源以及可和微处理器总线直接接口的暂存/三态输出缓冲器。
本系统采用TMS320VC5402作为主控芯片。这种定点DSP芯片可实现光纤光栅传感信号的处理、步进电机的控制和显示等。该芯片具有强大的数据运算和处理功能,利用其RPT和MAC指令可以在单指令周期内实现乘累加运算。其灵活的循环缓冲区和高效的C语言可使TMS320VC5402方便地实现数据的循环寻址与卷积运算,从而实现高速度解调。
2.2 系统软件设计
DSP系统的软件部分主要由初始化程序、线性插值子程序或者曲线拟合子程序、显示程序、驱动程序、中断服务程序等几部分组成,可以将A/D转换和串行通讯代码放在中断服务程序中来实现。
初始化程序用于完成DSPI/O口、内部A/D转换器、串行口、中断等资源的初始化。为了协调A/D转换和步进电机的控制,可由DSP发出控制信号来控制步进电机,以使经过A/D转换所得的数字信号与加在匹配光栅上的步数一一对应。显示部分的程序可将此数字信号经代数变换转换为直接表示应力的数字量,然后通过查表动态实现应力显示。
当匹配光栅反射波长与光纤光栅反射波的中心波长重叠时,光电转换输出脉冲信号,并向DSP请求中断,然后由DSP执行中断服务程序,以将DSP内部A/D转换器转换所得的数字量读入DSP并保存起来,最后通过串行口发送到上位机再中断返回。

干涉仪相关文章:干涉仪原理
光纤传感器相关文章:光纤传感器原理










评论