基于双ATmega128的安检力学试验机设计

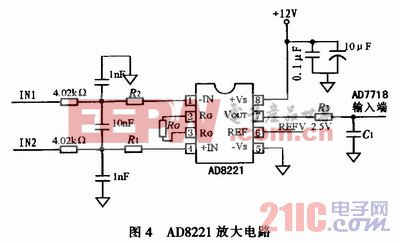
图4中,RG为增益电阻,IN1和IN2为传感器输出的2个差分信号,电容C1、C2以及4.02 kΩ电阻构成射频干扰抑制电路。其中电容C1抑制的是差动干扰信号,C2抑制的是两输入端的共模干扰;根据AD8221数据手册,选用300 Ω的增益电阻将信号放大100倍左右,即将传感器输出信号转换到0~2.5 V范围内。在本设计中,共使用3路放大电路,分别对拉/压力传感器和2路位移传感器输出信号调理。
2.3 模拟量采集电路
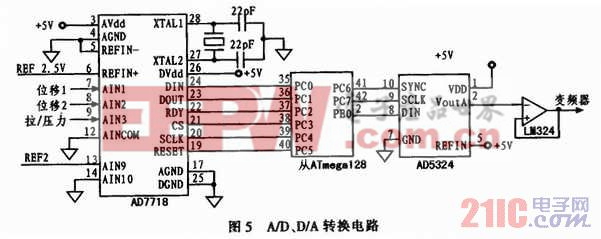
本系统对于模拟信号采集精度的要求很高,ATmega128单片机内部10位A/D转换器无法满足。根据要求选用美国ADI公司的低噪声、高分辨率和基于∑-△转换技术的24位A/D转换器AD7718。该器件8/10通道单端输入,具有增益可编程。本设计中,传感器输出信号经过放大滤波等处理后,可看作为差分信号,因此通过软件配置AD7718为8通道单端输入模式。设计时使用低温漂和低噪声的AD780输出2.5 V电压作为参考电源。此外AD7718在使用时必须将模拟地和数字地隔离开来,这样可消除任何耦合到AD7718模拟部分的高频噪声,其电路如图5所示。
2.4 变频器控制模块
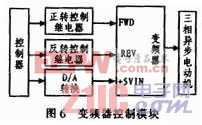
根据不同试验的要求,需要控制电动机的转速和正反转,本设计通过单片机控制变频器来实现这些功能。设计中使用开关量输出控制变频器A100-3022的外部端子FWD、REV来实现电动机正反转的控制,将AD5324的输出经电压跟随处理后连接到变频器的外部输入端子+5 V IN,利用该0~5 V之间的电压信号控制变频器的输出频率。具体实现框图如图6所示。
2.4.1 D/A转换电路
根据不同的试验,对电动机所带动的升降机构的运行速度有严格的要求,利用变频器的面板的按键操作或者外部电位器对变频器的频率进行给定,这种对频率的改变实时性较差,而且也无法实现自动操作。本设计选用AD5324输出0~5 V电压信号作为频率调整的信号。AD5324为12位的D/A转换器,0~REF的模拟输出范围。另外,在AD5324的输出端增加一路由LM324构成的电压跟随电路,用于增强负载驱动能力。
2.4.2 开关量输入输出电路设计
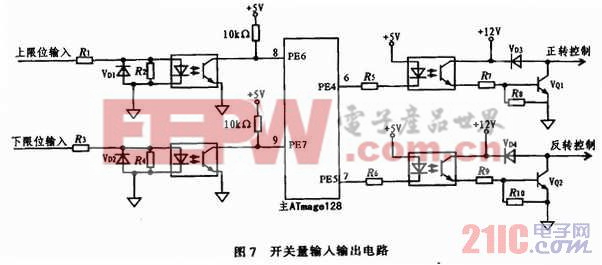
本试验机使用机械结构形式的限位开关ME-8104,作为升降机构的上、下限位。设计时在限位开关与单片机端口之间增加光电隔离器,以有效地抑制尖峰脉冲,避免外部干扰噪声进入单片机系统;开关量输出主要用于控制电机正反转。在变频器上有2路控制端子,直接用继电器信号输入即可。光耦隔离的开关量输入输出控制电路如图7所示。不过需要注意的是:开关量输出在连接到变频器之前需要做正反转控制信号互锁,以免出现逻辑控制错误。
















评论