一种非均匀行采集的智能车路径识别算法

断点修补
本文引用地址:https://www.eepw.com.cn/article/114481.htm由于光线的不均匀或路径中出现较大的干扰,可能会出现部分行采集不到引导线的情况,从而出现断点。而且交叉道路的图像经过上述方法处理后也会出现断点的情况,因此有必要加入断点修补环节,对路径进行纵向滤波。
根据引导线的连续性,路径坐标不应该出现突变的情况,也就是引导线的一阶导数应该是连续的,即引导线的斜率不会发生突变。根据这个特性,断点修补的方法步骤如下:
(1)求出第i行与第2i−行的路径坐标之差
(2)求出第1i−行与第3i−行的路径坐标之差
(3)求出Dposition[1]与Dposition[2]之差的绝对值
(4)若Adposition大于4,则
通过该算法,道路图像断点区域得到了修复,引导线从首点到末点之间形成了一条连通的曲线,这种断点修补方法满足了智能车提取引导线趋势的要求。
纵向滤波
对于某些跳变不大的干扰行,虽然不会影响对路径整体趋势的判断,但其对后续控制模块的计算会产生较大影响。当控制行坐标突变时,势必会造成舵机的抖动,智能车速度较快时甚至会导致车体脱离引导线,因此加入纵向滤波环节对路径进行平滑很有必要。
纵向滤波采用中值滤波的思路,具体方法为:判断该行路径坐标若在其前一行和后一行的同一侧,即该行坐标同时大于或同时小于其前一行和后一行坐标,则赋予该行坐标为其前一行和后一行坐标的平均值。
导航参数获取
经过路径提取后,得到引导线在图形坐标系下的坐标(u,v),然后通过式(3)、(4)得到引导线的世界坐标(x ,y ),通过最小二乘法进行曲线拟合,便得到引导线的曲线方程。对于直线模型y=kx+b,可运用斜率 k和截距b作为导航参数对车体进行控制[7];对于曲线模型,可得到弯道的曲率半径和横向偏差作为导航参数对车体进行控制。
实验结果分析
采集方案实验
摄像头采集的图像如图6所示,a为均匀行采集效果,b为按表1分布行数采集的效果。由图可以看出,非均匀行采集的图像更接近实际图像,对引导线曲率的计算更加准确,为智能车控制决策模块提供了更加精确地引导线信息。而且,由图还可看出通过非均匀行采集,相对提高了摄像头的
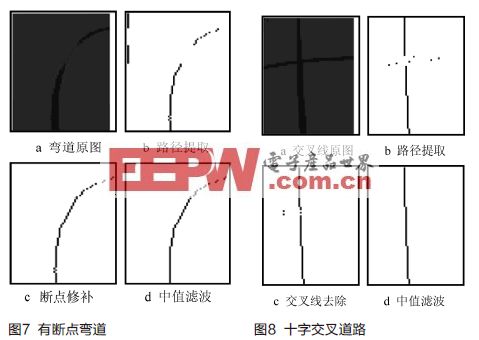
图7 有断点弯道
图8 十字交叉道路前瞻性,为进一步提高智能车的速度打下了基础。
路径识别实验
摄像头获取的弯道图像如图7a所示,由于光线的影响,中间部分出现了断点,经断点修复和中值滤波后得到的图像分别如图7c和7d所示,道路图像断点区域得到了修复,引导线从首点到末点之间较平滑,据此可获得路径的精确导航参数。
十字交叉道路是智能车导航中较常见的路况,同时也是路径识别中比较复杂的内容。如图8a所示的十字交叉道路经路径识别后得到的引导线如图8d所示,可以将交叉线完全滤除。
结语
本文基于黑白摄像头设计了图像采集系统,为消除图像畸变,提出了非均匀行采集的采集方案。图像处理时,首先在行中断中对单行数据进行了横向滤波和边缘检测,并提取了该行路径坐标;然后在场中断中,根据引导线的连续性对整场数据进行了纵向滤波,对整场路径进行了平滑,并提取出了引导线的精确导航参数,为下一步进行车体控制提供了信息。实验结果表明,该算法能精确提取路径信息,且可靠性和抗干扰性强,数据处理速度快,完全满足智能车实时性的要求。



评论