基于DSP高精度伺服位置环设计

控制器算法
本文引用地址:https://www.eepw.com.cn/article/110546.htm系统采用三环控制结构,电流环、速度环采用PI控制,位置环采用比例加前馈补偿控制。
PID控制算法
PID控制算法是控制中最常用的算法,对于大多数的控制对象采用PID控制均能达到满意的效果。为防止PID调节器出现过饱和,系统采用带退饱和的PID控制器,如图2所示。

离散PID控制算法如下:
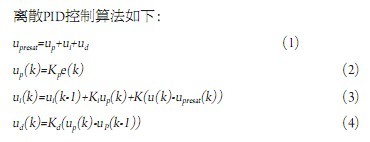
式中,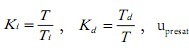 ,upresat为饱和前的输出,KP为PID控制的比例增益,Ti为PID控制的积分时间常数,Td为PID控制的微分时间常数,Kc为退饱和时间常数。
,upresat为饱和前的输出,KP为PID控制的比例增益,Ti为PID控制的积分时间常数,Td为PID控制的微分时间常数,Kc为退饱和时间常数。
位置控制器的控制算法
位置控制器采用比例加前馈控制结构,如图3所示,其中Gm为电机的传递函数,Gspd为速度环的传递函数,Gpos为位置环的传递函数,Fpos为位置前馈控制器传递函数。

系统的传递函数为:

当Fpos(s)=1/(Gspd(s)Gm(s))时,H(s) =1,则可使输出完全复现输入信号,且系统的暂态和稳态误差都为零。其中当速度调节器采用PI控制时,在位置环的截止频率远小于速度环的截止频率时,速度环可等效为一个惯性环节,电机可等效为一个积分环节,于是Fpos(s)可以看成加速度前馈和速度前馈两部分,其中:位置前馈中加速度项差分方程:
![]()
式中R(k)为第K个采样周期中的位置给定信号;Yaf为第K个采样周期中加速度信号的输出,Kaf为加速度前馈比例系数。

伺服电机相关文章:伺服电机工作原理
分频器相关文章:分频器原理








评论