基于激光扫描原理的路径检测方案
微分放大电路的输出经过R22和C33滤除可能存在的尖峰脉冲后送入由U4A和U4B构成的比较器,分别将符合幅度条件的上跳变信号和下跳变信号分别检出,并经过U7E和U7B反相器(带施密特整形)送入由D触发器构成的RS触发器,触发器的输出波形见图3中的CH4所示,由于此波形中的脉冲代表了扫描线相对引导线的位置信息,下文将称之为“脉冲信号”。至此硬件电路完成了对引导线的检测与波形处理。
软件实现
将激光扫描器安装在小车的正上方,使扫描线中心点位于车身的轴线上。改变小车轴线距引导线中心的位置y,记下脉冲信号相对于同步信号的偏移位置x,测得一组数据。用最小二乘法拟合可得出y与x的对应关系:
y=k×(x+ref ) (1)
其中直线斜率k与零位偏移ref的值与扫描器安装的位置有关。此外,测量脉冲信号(图3中CH4)宽度,可知此宽度与引导线的宽度成比例关系。
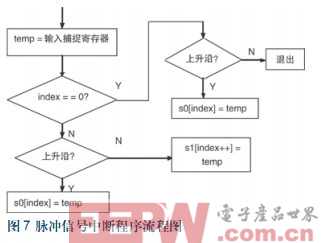
激光扫描器输出两个信号:同步信号与脉冲信号。同步信号用于指示每一个扫描周期的起始位置,而脉冲信号代表了扫描到的引导线信息。因此,可由这两个信号计算出小车当前相对于引导线的位置偏移。





















评论