基于DSP的混合悬浮控制系统的硬件设计

引言
本文引用地址:https://www.eepw.com.cn/article/91222.htm磁悬浮列车是依靠电磁吸力或电动斥力将列车车厢托起悬浮于空中并进行导向,实现列车与地面轨道间的无机械接触,从根本上克服了传统列车轮轨粘着限制、机械噪声和磨损等问题,具有长寿命、无污染、无噪声、能耗低、不受任何速度限制、安全可靠等优点。而电磁永磁混合悬浮系统可借助永磁体来产生大部分的悬浮力,从而可以减少悬浮系统的功耗,显著降低悬浮电源的容量,并且悬浮气隙可以适当增加,使得整个系统更加安全,轨道梁的造价也将下降。
传统的数字控制器大多采用较高档的单片机来实现复杂的计算和控制,但实时性变差,难以得到较好的动态性能。采用DSP控制,既可以保证计算和控制的实时性,又能充分发挥数字控制的诸多优点。
混合悬浮系统的数学模型
为了更方便地研究系统的数学模型,将该系统的物理模型简化为图1所示的形状。
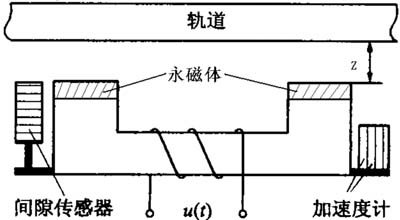
图1 混合悬浮系统的分析模型
在进行系统数学模型分析之前首先做如下假设:忽略永磁体内部的漏磁通。
则混合悬浮系统电学和力学方程为:
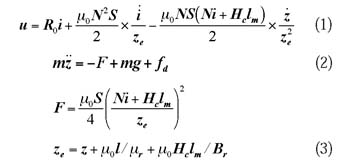
其中,为悬浮质量,为电磁力,为外部干扰力,和分别为电磁铁电压和电流,为电磁铁线圈匝数,为线圈电阻,为有效磁面积,为等效气隙,为实际悬浮气隙,为真空磁导率,为铁心磁导率,为磁路在铁心和轨道中的总长度,为永磁体的剩余矫顽力,为永磁体的剩磁,为永磁体的厚度。
式(1)~(3)所得方程为非线性方程,难以精确求出方程解,若对方程进行平衡点附近线性化处理,可得:

其中, 和分别为电磁铁电压和电流相对平衡点的增量;表示气隙变化单位值时,磁力的变化值;表示线圈电流变化单位值时,磁力的变化值;表示混合磁铁在平衡点处的电感。
选取位移、速度和加速度为状态变量,则系统状态方程为:
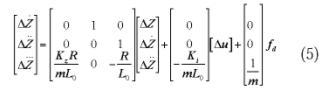
开环电磁永磁混合悬浮系统在工作点处线性化后的状态空间表达式为:

其中,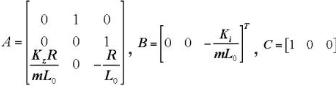
状态向量取为: ,z为气隙误差。
,z为气隙误差。
悬浮控制器的硬件设计
要实现混合悬浮系统的稳定悬浮,必须根据电磁铁的各种状态对电磁铁的电流进行调节,实际上这是通过改变电磁铁的输入电压来实现的。混合悬浮系统的控制框图如图2所示。
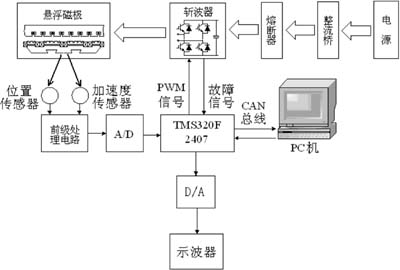
图2 悬浮控制器的原理框图
对悬浮控制的最基本要求是控制系统要具有快速响应、动态过程平稳、抗干扰好的性能特点,其中抗干扰性尤为重要。控制系统的实现可以全部采用模拟电路,也可以采用以数字电子计算机为核心的数字电路。模拟电路运算速度快,实时性好,但控制精度低、受外界环境影响大,且不易实现复杂的控制算法,调试困难。
DSP
DSP器件是一种特别适用于数字信号处理运算的微处理器,以DSP器件为核心的控制系统具有非常快的数据处理能力和良好的扩展能力,克服了模拟控制器和以单片机为核心的数字控制器的缺陷。本设计采用数字控制技术,控制电路的硬件包括:输人信号的调理,信号、开关量的量化与采集,控制运算主电路及其输出信号与其他器件信号之间的接口电路等。采用TI公司的最新产品TMS320LF240A DSP作为控制电路的中央计算电路,并且产生PWM波形输出。
斩波器
悬浮控制要求反映动作快,为减小斩波器所具有的滞后性,要求所选用的斩波器具有较高的输出电流变化率且安全可靠。考虑到流过磁极的电流有两种相反的方向,因此悬浮磁极的驱动斩波器选用全桥斩波器——H型斩波器。其拓扑结构如图3所示,拟采用两电平调制,即开关T1和T3的开关信号相同而开关T2和T4的开关信号相同,为避免直流贯通,T1(T3)的开关信号与T2(T4)的开关信号之间有适当的死区。
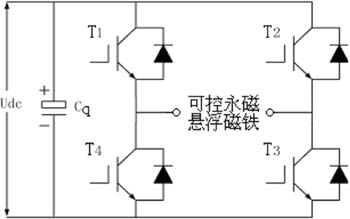
图3 悬浮斩波器的拓扑结构
前级处理电路
前级处理电路其主要功能是完成传感器信号的放大,与基准信号的比较,以及信号的转换,滤波。由于没有采用速度传感器,而通过软件方法获得的信号又不能令人满意,可设计对气隙信号进行微分处理的微分电路,如图4所示。
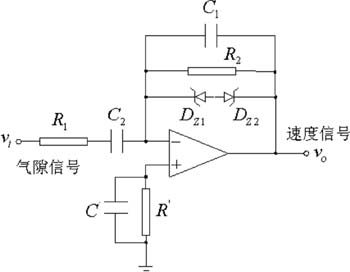
图4 微分电路
此电路的输入与输出关系为:
A/D转换电路
A/D转换电路实现采样保持和A/D转换两种功能,它是在TMS320LF2407A微处理器控制下完成操作的。本文采用MAX125芯片实现这一部分功能。
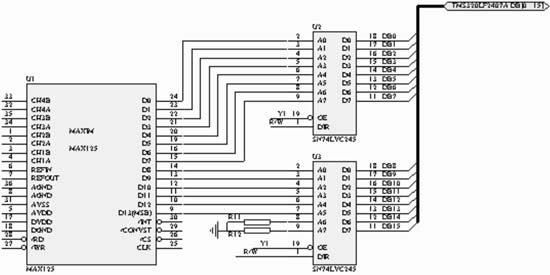
根据MAX125接口电路的特点,设计如图5所示与TMS320LF2407A的接口电路。
图5 MAX125和TMS320LF2407A的接口电路
D/A转换电路
D/A转换电路选用TI公司的高性能D/A转换器TLC7225,它片内包含四路8位电压输出数/模转换器(DAC),每个DAC都有分离的片内锁存器。数据通过一个公共的8位TTL/CMOS兼容(5V)输入口送入这些数据寄存器之一。
实验结果
混合悬浮系统的参数如下所示:


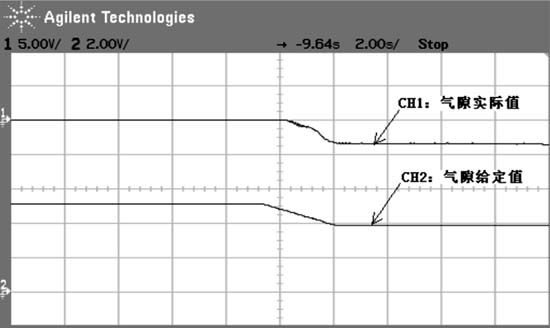
图6为悬浮系统慢浮起过程的示波器记录。混合悬浮系统初始机械气隙为0.02m,稳定悬浮机械气隙为0.015m。
X轴:2.00s/div;一通道Y轴:2.00V/div;二通道Y轴:1.00V/div
图6 混合悬浮系统慢起浮气隙实验结果
图7给出了混合悬浮系统慢起浮电流的实验结果。
X轴:2.00s/div;Y轴:2.00V/div 电流钳:100mV/A
图7 混合悬浮系统慢起浮电流实验结果
实验结果表明该硬件设计能够实现电磁铁的稳定悬浮。
结论
与传统的纯电磁悬浮系统相比,电磁和永磁组成的混合悬浮系统在相同悬浮功率的情况下可实现大气隙悬浮,即可达到20mm左右的悬浮气隙,这可降低车载蓄电池容量和重量,降低列车的自重,增加有效载荷,因而可以降低轨道精度要求,从而降低轨道工程造价。该系统采用以TMS320LF2407A为核心的悬浮控制电路,具有非常快的数据处理能力,克服了模拟控制器和以单片机为核心的数字控制器的缺陷。通过实验实现了系统的稳定悬浮,验证了设计的合理性。
参考文献:
[1]Liming Shi, Zhengguo Xu, Nengqiang Jin, Shaohui Xu. Decoupled Control for the Hybrid-Magnets used in Maglev System with Large Air-gap. LDIA2003:267-270.
[2] Zhengguo Xu, Nengqiang Jin,Liming Shi and Shaohui Xu. Maglev System with Hybrid-excited Magnets and an Air-gap Length Control. Maglev 2004:1019-1023.
[3]Kinjiro Yoshida, Ju-Lee. 3-D FEM Field Analysis in Controlled-PM LSM for Maglev Vehicle[J].IEEE.Trans. 1997,33(2):2207-2210.
[4] Mir Behrad Khamesee, Norihiko Kato, Yoshihiko Nomura. Design and control of a microrobotic system using magnetic levitation [J]. IEEE.Trans. 2002,7(1):1-14.
[5] Kinjiro Yoshida, Testnao Umino. Dynamics of the propulsion and levitation systems in the controlled-PM LSM maglev vehicle[J]. IEEE.Trans. 1987,MAG-23(5):2353-2355.









评论