智能寻迹小车

摘要: 本文介绍了一种基于51单片机的小车寻迹系统。该系统采用两组高灵敏度的光电对管,对路面黑色轨迹进行检测,并利用单片机产生PWM波,控制小车速度。测试结果表明,该系统能够平稳跟踪给定的路径。
关键词: 智能小车;光电对管;寻迹;脉冲宽度调制
在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案
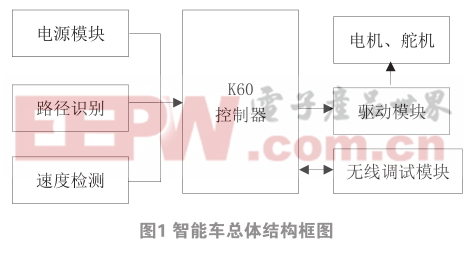
整个电路系统分为检测、控制、驱动三个模块。首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。系统方案方框图如图1所示。
![]()
图1 智能小车寻迹系统框图
传感检测单元
小车循迹原理
该智能小车在画有黑线的白纸 “路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择
市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:
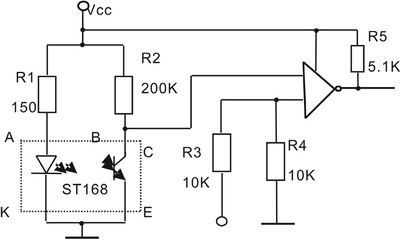
图2 ST168检测电路
ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。因为传感器输出端得到的是模拟电压信号,所以在输出端增加了比较器,先将ST168输出电压与2.5V进行比较,再送给单片机处理和控制。
传感器的安装
正确选择检测方法和传感器件是决定循迹效果的重要因素,而且正确的器件安装方法也是循迹电路好坏的一个重要因素。从简单、方便、可靠等角度出发,同时在底盘装设4个红外探测头,进行两级方向纠正控制,将大大提高其循迹的可靠性,具体位置分布如图3所示。
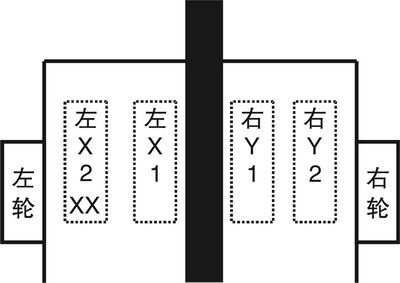
图3 红外探头的分布图
图中循迹传感器全部在一条直线上。其中X1与Y1为第一级方向控制传感器,X2与Y2为第二级方向控制传感器,并且黑线同一边的两个传感器之间的宽度不得大于黑线的宽度。小车前进时,始终保持(如图3中所示的行走轨迹黑线)在X1和Y1这两个第一级传感器之间,当小车偏离黑线时,第一级传感器就能检测到黑线,把检测的信号送给小车的处理、控制系统,控制系统发出信号对小车轨迹予以纠正。第二级方向探测器实际是第一级的后备保护,它的存在是考虑到小车由于惯性过大会依旧偏离轨道,再次对小车的运动进行纠正,从而提高了小车循迹的可靠性。









评论