智能寻迹小车
软件控制单元
单片机选型及程序流程
此部分是整个小车运行的核心部件,起着控制小车所有运行状态的作用。控制方法有很多,大部分都采用单片机控制。由于51单片机具有价格低廉是使用简单的特点,这里选择了ATMEL公司的AT89S51作为控制核心部件,其程序控制方框图如图4所示。
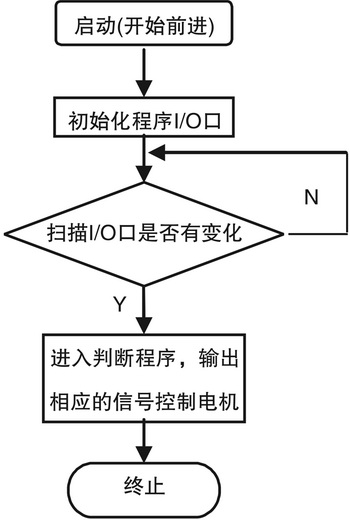
图4 系统的程序流程图
小车进入循迹模式后,即开始不停地扫描与探测器连接的单片机I/O口,一旦检测到某个I/O口有信号变化,程序就进入判断程序,把相应的信号发送给电动机从而纠正小车的状态。
车速的控制
车速调节的方法有两种:一是用步进电机代替小车上原有的直流电机;二是在原有直流电机的基础上,采用PWM调速法进行调速。考虑到机械装置不便于修改等因素,这里选择后者,利用单片机输出端输出高电平的脉宽及其占空比的大小来控制电机的转速,从而控制小车的速度。经过多次试验,最终确定合适的脉宽和占空比,基本能保证小车在所需要的速度范围内平稳前行。
电机驱动单元
从单片机输出的信号功率很弱,即使在没有其它外在负载时也无法带动电机,所以在实际电路中我们加入了电机驱动芯片提高输入电机信号的功率,从而能够根据需要控制电机转动。根据驱动功率大小以及连接电路的简化要求选择L298N,其外形、管脚分布如图5所示。
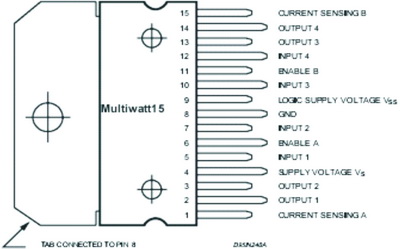
图5 L298N管脚分布图
从图中可以知道,一块L298N芯片能够驱动两个电机转动,它的使能端可以外接高低电平,也可以利用单片机进行软件控制,极大地满足各种复杂电路需要。另外,L298N的驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够这个问题。
结语
此方案选择的器件比较简单,实际中也很容易实现。经过多次测试,结果表明在一定的弧度范围内,小车能够沿着黑线轨迹行进,达到了预期目标。不足之处,由于小车采用直流电机,其速度控制不够精确和稳定,不能实现急转和大弧度的拐弯。
参考文献:
1. 赵家贵、付小美、董平,新编传感器电路设计手册,中国计量出版社,2002
2. 李华等,MCS-51系列单片机实用接口技术,北京航空航天大学出版社,2003
3. 王晓明,电动机的单片机控制,北京航空航天大学出版社,2002










评论