基于磁阻传感器的弱磁信号采集系统设计

0引 言
本文引用地址:https://www.eepw.com.cn/article/83576.htm通常所用的数据采集系统,其采样对象都为大信号,即有用信号幅值大于噪声信号,但在一些特殊场合采集的信号很微弱,并淹没在大量的随机噪声中。此种情况下,一般的采集系统和测量方法无法检测该信号,本采集系统硬件电路针对微弱小信号,优化设计前端调理电路,利用仪表放大器有效抑制共模信号,保证采集数据的精度要求。
磁阻传感器是感知磁性物体的存在或者磁性强度(在有效范围内)的敏感元件。这些磁性物体除永磁体外,还包括顺磁材料,也可感知通电线圈或导线周围的磁场。本文选用霍尼韦尔磁阻传感器HMC1002,它是二维磁阻微电路,是小型集成电路封装(SOIC)的双磁场传感器。2只传感器的敏感方向互相垂直。传感器A感应与外封装长边方向平行的磁场,传感器B感应与外封装长边方向垂直且与表面平行的磁场。HMCl002对于±2 Gs(1Gs=10-4T)范围内的磁场很敏感,具有灵敏度为3.2 mV/V/Gs的线性输出,分辨力为27μGs。
1 阻效应原理和传感器工作原理
1.1磁阻效应原理
物质在磁场中电阻发生变化的现象称为磁电阻效应。磁电阻效应有普通与各向异性磁电阻效应之分。各向异性磁电阻效应指:当外加磁场偏离强磁性金属(铁、钻、镍及其合金)内部的磁化方向时,金属的电阻减小,而平行时基木上没有变化,玻莫合金薄膜的电阻率ρ依赖于磁化强度M和电流I方向的夹角,即

玻莫合金(Fe20Ni80)在弱磁场下电阻变化量比较大,因此,适合于弱磁场条件下使用。
1.2传感器工作原理
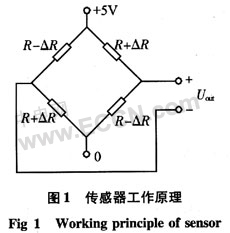
1)整个传感器最关键的部分是其中的惠斯通电桥。当外加磁场后,电桥的电阻变化,如图1所示,引起传感器输出电压Uout变化
Uout=(△R/R)Ub,
式中 Ub为传感器工作电压。
2)置位和复位电流带用来修正传感器灵敏度。在外场超过10×10-4T的磁场会打乱传感器内部磁畴的极化方向,改变传感器的输出特性,降低灵敏度。利用置位和复位电流带上施加脉冲,使内部磁畴的极化方向统一,提高灵敏度。
2采集系统设计
整个数据采集系统包括三大部分:置位/复位部分、信号调理部分和采集部分,前端调理电路主要功能是消除共模干扰,对微弱小信号进行放大、滤波、差分输出,经屏蔽线传输至数据采集部分,数据采集部分完成数据采集并存储,置位/复位部分避免了磁阻传感器受到环境中强大磁场的干扰而导致的输出衰变,保证了数据输出的正确和稳定。
2.1置位/复位电路
当磁阻传感器暴露于干扰磁场中时,传感器元件会分成若干方向随机的磁区域,从而导致灵敏度衰减。环境中的强磁场(大于5 ×10-4T时)会导致磁传感器输出信号变异,为了消除这种影响并使输出信号达到最佳,就需要应用磁开关技术(SR+/SR-)来抵消剩余磁场,而HMC1002是借助一个偏置磁场以补偿干扰磁场,即通过集成在芯片内部的置位/复位合金带对薄膜施加3~4 A,20~50 ns的脉冲电流就可以重新将磁区域对准,统一到一个方向上,这样,可确保高灵敏度和可重复的读数。
本系统采用的置位/复位电路,其产生的强电流脉冲为11.2A(>4A)满足了系统的要求,从而可实现低噪声和高灵敏度的磁场测量。
2.2信号处理电路
前端信号处理电路由仪表放大器、四阶巴特沃思低通滤波器等部分构成,其基本框图如图2所示。

数据采集系统中,若待测信号为微小信号时,使后续得到的电压信号也很小,幅值不定,为了使信号的幅值适中,需将信号放大。通用运算放大器不能直接放大微弱信号,必须用仪表放大器,仪表放大器具有高输入阻抗、低输出阻抗、强抗共模干扰能力、低温漂、低失调电压和高稳定增益等特点。
本系统采用美国ADI公司的集成仪表放大器AD623,AD623具有优良的CMRR(它随增益增加而增加),使误差最小,电源线噪声及其谐波都受到抑制,高精度直交流性能和通过一只外接电阻使增益方便地在1~1000范围内变化等优点,在检测微弱信号的系统中广泛作为前置放大器。本系统采用两级放大,第一级放大10倍,第二级放大100多倍,共放大1000多倍。
在采样前必须对信号进行抗混叠滤波处理,同时,滤除高频噪声。本系统主要针对磁信号,其频率在1 kHz以内,所以,滤波器的截止频率不超过1 kHz。该滤波器幅频特性平坦,并有良好的衰减特性,因而,在许多滤波电路设计中得到应用,经测试取得了良好的滤波效果。
2.3采集部分
本系统采集部分采用UA306型A/D采集器,该采集器分辨力为16位,16或32通道,实时采样率达250 k,另外,它还有测量精度高、速度快、无需要外接电源、编程方便、通过USB接口与计算机相连接等许多优点。需要数据时,直接从PC中将数据导入分析软件中即可,使用起来很方便。
3实验结果与分析
通过室内/室外实验分别对系统电路进行了实验测试。
3.1 室内实验
磁传感器水平放置时,镊子沿着磁传感器A轴方向正上方平行运动,且距离传感器的高度为20 cm,在保持相同的条件下(运动速度除外),通过比较测试结果很容易得出磁性物体运动速度对磁传感器输出信号的影响:运动速度影响磁信号的宽度,当速度较大时,其图形的宽度较窄;反之,图形的宽度较大。多次比较输出信号幅值,速度变化时,幅值变化不大,磁信号的输出幅值仅取决于所测磁介质的不同。
3.2室外实验
通过直线法和圆周法对不同目标(三菱汽车和中巴客车)进行了信号采集,采样率为3 k。在直线法采集中,目标与传感器的距离为4m,且三菱车的行驶速度为20km/h,中巴为14 km,/h。图3、图5是对三菱车信号采集的结果,图4是对中巴客车信号采集的结果。
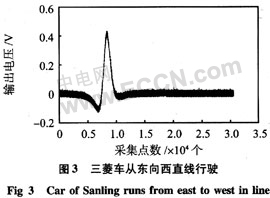
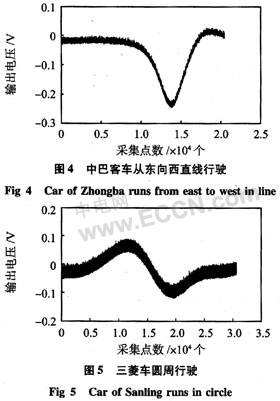
1)图3、图4比较可以看出:横轴显示图3有效信号的跨度比图4的小,图3中输出磁信号的幅值大于0.4V,而图4中小于0.3 V,即图3中的输出信号幅值比图4中的大。这是因为图3中的目标移动速度较大,另外,由于2个目标不同,即对传感器周围的磁场影响程度不一样,故测得的输出信号幅值也不同。
2)直线法和圆周法比较可以看出:图5、图3、图4中的曲线变化规律明显不同,曲线形状变化较大是因为目标运动方式不同,即影响磁场的方式不同,从而测得曲线有差别,图5曲线中有个较大的峰值,是因为车在圆周行驶时,在采集信号期间车有一次通过传感器敏感轴的正方向。另外,由于采集时间有限,所以,曲线没有反映信号周期性变化,若采集时间达到2个周期,则会出现2个主峰。
另外,通过比较三菱车不同方向行驶时的曲线可以看出:图中曲线主峰偏向相反,是因为目标移动方向相反,这是由磁阻传感器的特性决定的。
4结束语
本文利用有效的模拟信号调理方法,设计了一种基于磁阻传感器的弱磁信号采集系统,为保证采集信号的正确性,此系统配有置位/复位电路,另外,该系统还具有能够检测微小信号和获取数据简单等特点。












评论