基于32位DSP及电机驱动芯片的悬挂运动控制系统设计

随着32位DSP的普及,32位处理器已经成为控制领域的主流产品,与传统的微处理器相比速度更快、性能更强、资源丰富,更符合发展的脚步。TMS320F28027是一款32位的DSP,具有运算速度快、稳定性高的优点。本文利用TMS320F28027控制两个步进电机,从而使物体在平面内运动,实现物体在平面内可以任意地画指定的曲线和圆等。图1为悬挂系统的模型。
本文引用地址:https://www.eepw.com.cn/article/273860.htm1系统总体方案的设计
图2为悬挂系统控制框图,以TMS320F28027为控制芯片,利用L298N驱动两个步进电机。步进电机采用42HS4813A4,其额定电流为1.3A,步距角为1.8°,利用LCD-12864液晶显示被控制物的实时坐标。控制2个步进电机正向、反向转动来达到物体在平面内任意运动的效果。
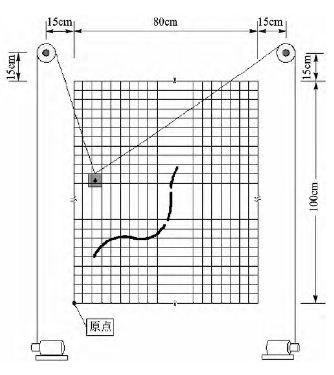
图1悬挂系统的模型
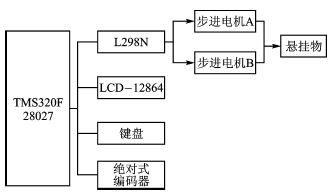
图2悬挂系统控制框图
2硬件电路设计
2.1 L298N
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。图3为L298N模块的电路原理图。该芯片的主要特点是:工作电压高,其最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;内含两个H桥的高电压大电流全桥式驱动器。利用2个L298N来分别控制2个步进电机,步进电机的额定电流为1.3A,同时通2相时,电流为2.6A,L298N可以达到42HS4813A4步进电机的电流要求。
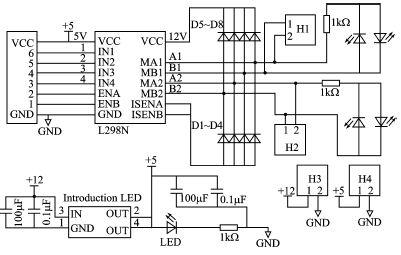
图3 L298N模块电路原理图
2.2绝对式编码器
绝对式编码器的精度必须要高于步进电机的精度,所以这里采用的是10位绝对式编码器。选用的型号是Mini1024J,精度为10位,优点在于采用无接触霍尔检测技术,传感器运行不受灰尘或其他杂物影响,很好克服了基于光学检测原理的缺点。
3系统软件设计
3.1几何关系1:从任意点移动到任意点算法
坐标示意图如图4所示,有如下的边长和角度关系:
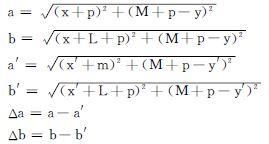
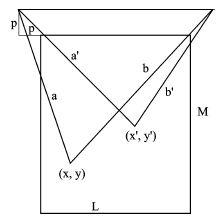
图4坐标示意图
3.2几何关系2:当前位置坐标显示算法
如图5所示,存在以下的角度和边长关系:

控制代码如下:
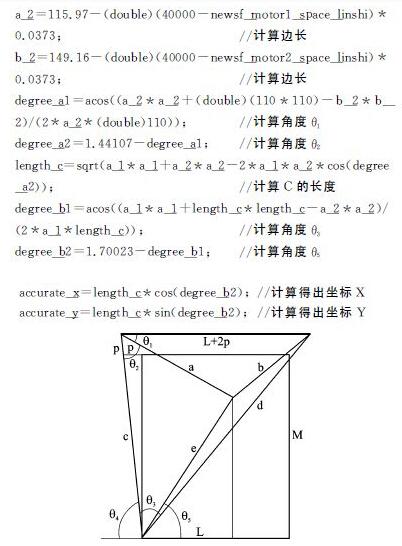
图5坐标示意图

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理









评论