DSP和OZ890的电池管理系统设计

本设计主要实现数据采集、电池状态计算、均衡控制、热管理、各种通信以及故障诊断等功能。
本文引用地址:https://www.eepw.com.cn/article/257697.htm1 电池管理系统硬件组成
电池管理系统电路由电源模块、DSP 芯片TMS320LF2407A[1](简称为“LF2407”)、基于多个OZ890[2]的数据采集模块、I2C[3]通信模块、SCI 通信模块、CAN 通信模块组成。系统硬件框图如图1 所示。
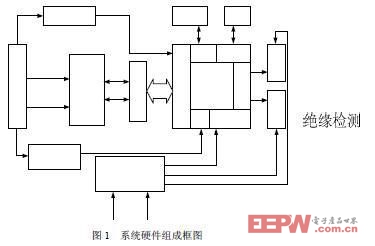
1.1 电源模块
整车提供的电源为+12V,管理系统需要的电压包括:+3.3V(DSP,隔离电路用)、+5V(总线驱动等芯片用)、±15V(电流传感器),可以通过DC-DC 转换得到,这样不但可以满足各个芯片的供电要求而且可以起到隔离抗干扰的作用。
1.2 数据采集模块
由DSP 完成总电压、电流及温度的采集。电池单体电压的采集和均衡由OZ890 芯片完成,并利用I2C 总线发给DSP,本模块电路主要包括前端采集处理和均衡电路。
1.3 I2C 通信模块
OZ890 采样模块将采集处理后的数据通过I2C 总线发送到LF2407,由于LF2407 自身不带I2C 接口,本设计利用PCA9564[4]扩展其I2C 接口。为了防止电磁干扰影响I2C 总线上数据的传输,必须对总线信号进行隔离,考虑到I2C 总线是双向传输的,使用ADuM1250双向隔离芯片进行隔离。PCA9564 及双向隔离电路如图2 所示。
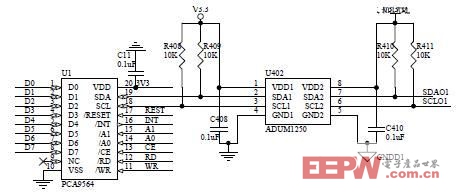
图2 PCA9564 及双向隔离电路
PCA9564 是I2C 总线扩展器,与LF2407 的GPIO 口相连,它支持主从模式的数据收发,在BMS 中设定LF2407 为主器件,OZ890 位从器件。LF2407 通过读写PCA9564 内部四个寄存器的内容来与OZ890 通信。
ADuM1250 是热插拔数字隔离器,包含与I2C 接口兼容的非闩锁、双向通信通道。这样就不需要将I2C 信号分成发送信号与接收信号供单独的光电耦合器使用。
1.4 串口通信模块
电池管理系统将采集处理后的数据通过串口发送到PC 机界面上,实现人机交互。通过串口界面,可以观察到电池的总电压、单体电压、电流、SOC、故障状态、充放电功率等参数,还可以通过串口发送实现管理系统的在线标定。其硬件电路主要基于MAX232 芯片,如图3a)所示。
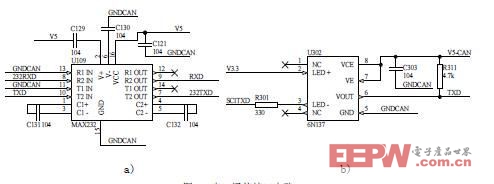
图3 串口通信接口电路
MAX232 是+5V 电源的收发器,与计算机串口连接,实现RS-232 接口信号和TTL 信号
的电平转换,使BMS 和PC 机能够进行异步串行通讯。为了防止电磁干扰影响串口上数据的传输,必须对总线信号进行隔离。串口是单向传输,所以利用6N137 光电耦合较为方便,图3b)所示为232TXD 信号光耦隔离电路。
1.5 CAN 通信模块
CAN 通信是架接电池管理系统(BMS)与整车HCU 之间的信息桥梁,BMS 将电池的状态参数通过CAN 总线发给HCU,HCU 通过判断当前的电池状态来做出决策,分配电机和发动机之间的功率,控制电池的充放电。同时BMS 还可以接收HCU 发来的相关命令,做出相应的处理。其硬件方面主要是通过PCA82C250 通用CAN 收发器来提供对总线数据的差动发送能力和对通信总线数据的差动接收能力。通过类似于图3b)的光耦隔离电路来加强CAN 总线上的抗干扰能力。其硬件电路由图4 所示。

图4 CAN 通信接口电路
在电路中可根据整车要求,是否接入120Ω 的终端电阻,当JP201 跳线接1 脚和2 脚时,不接入电阻,当接2 脚和3 脚时,电阻接入。
2 电池管理系统的软件设计
电池管理系统软件[6]系统包括6 个任务和5 个中断。6 个任务包括:AD 转换处理任务(包括读取OZ890 中的数据)、CAN 接收任务、CAN 发送任务、SOC 计算任务、系统监视故障诊断任务和串口发送任务。5 个中断包括:AD 采集中断服务子程序、Timer1 下溢中断服务子程序、周期中断子程序、CAN 总线接收中断服务子程序和串口接收中断服务子程序,如下面的中断向量表所示:
.ref _c_int0
.ref _ADC, _INT2, _INT5
.sect .vectors
rset: B _c_int0;00h reset
int1: B ADC ;02h ADC
int2: B _INT2 ;04h 周期、下溢中断
int3: B int3 ;06h INT3
int4: B int4 ;08h INT4
int5: B _INT5 ;0Ah CAN, SCI
int6: B int6 ;0Ch INT6
根据整车控制策略,CAN 上电池状态数据每帧的刷新周期为10ms,故设置周期中断的时钟节拍为10ms;相应地设置以上几个任务的执行周期均为10ms。
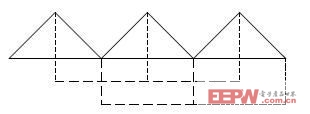
图5 周期时钟节拍图
从图5 中可以看出,系统初始化完成以后,Time1 开始计时,当达到5ms 时,在A 点发生周期中断,然后进入周期中断子程序,启动AD 转换,通过I2C 总线读取OZ890 中的数据。AD 转换完毕后,软件触发ADC 中断保存数据并进行相应的处理,清除周期中断标志。当达到10ms 时,发生下溢中断,进入下溢中断服务子程序,执行CAN 发送任务、SOC计算任务、系统监视故障诊断任务、串口发送任务。另外,CAN 接收和串口接收执行采用中断触发方式。利用周期中断和下溢中断来划分任务执行时间区域不仅能够满足整车10ms
每帧数据的CAN 发送要求,而且每一个任务时间也都能通过计数器和标志位的状态来计算任务的执行时间,以便更好的分配任务的执行时间段。
3 结论
电池管理系统采用了DSP+OZ890 的结构,加之相应的抗干扰措施,具有高性能、低成本等特点。由于采用了专门的电池采样芯片OZ890,提高了采样精度、解决了电池单体电压不均衡造成的过充问题。同时使硬件的开发周期大大缩短,增强了系统的可靠性和可维护性,在实际应用中取得了良好的效果。
本文作者创新点:使用OZ890 电池采样芯片测量电池数据,同时使用PCA9564 扩展LF2407 的I2C 接口,实现了LF2407 与OZ890 之间的通信。
作者:王涛 齐铂金 吴红杰 李伟











评论