车载姿态测量系统的开发

汽车运动状态信息的测量和采集是汽车操纵稳定性研究和设计的基本问题,也是实现汽车电子控制及辅助驾驶系统的必要条件。这就需要一种具有足够精度和置信度的、快速的、操作简便的和适用范围广的测量汽车运动状态的方法[1]。本文研究设计了一种基于可编程逻辑阵列(FPGA)的捷联式车载汽车姿态实时测量系统。此系统具有体积小、使用方便、成本低廉等优点。
1 系统组成
本系统主要由传感器组模块、数据采集卡、便携式计算机、电源等组成,系统硬件如图1所示。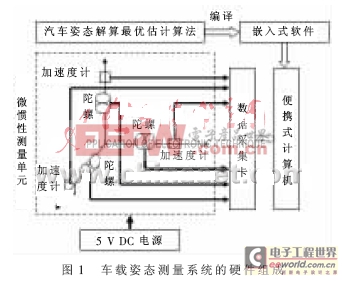
1.1 微惯性测量单元(MIMU)
自主设计的微惯性测量单元。由2个ADXL203型双向加速度计和3个ADXRS150型角速度陀螺组成,要求3个角速度陀螺安装在3个正交平面上,其敏感轴相互垂直,组成测量体的三维坐标系,2个双向加速度计安装在另外2个面上(剩下的1个面作为MIMU与汽车的安装固定平面)。为了保证加速度计的敏感轴也组成三维坐标系,要求测量垂向加速度的2个敏感轴相互平行(由于本MIMU在垂向测量了2次,因此在数据采集阶段垂向加速度取两者的均值)。
1.2 数据采集卡
数据采集卡是基于FPGA控制和USB2.0接口的采集卡,它可实时对6路模拟信号进行不间断的采集,输入信号幅度范围是0~5 V,AD转换位数为16位,单通道采样率为250 kS/s,所使用的USB传输方式为高速块传输,应用FPGA作为采集的控制单元,并采用USB总线供电,移动性好,内置信号连接,可以满足车载测量实时性和精准性的需求[2]。图2为该数据采集卡的组成框图。
2 系统软件
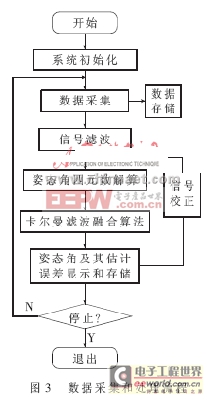
系统软件分为数据采集软件和数据处理软件两部分,其流程如图3所示。本系统采用Visual Basic 2005语言编程实现,依次实现信号采集、初始信号滤波、姿态角解算、Kalman滤波融合、结果的显示和存储等功能。







评论