基于DSP和CPLD的载波移相多电平PWM实现的研究

1 引言
随着电力电子技术和电力半导体技术的迅速发展,中压大功率传动设备在石油化工、矿山开采、轧钢和冶金、运输等领域得到了广泛的应用,不仅提高了资源的利用率,同时还降低了生产的成本,其中变频器扮演着重要的角色。虽然其电路的拓扑结构和控制技术已经比较成熟,但多电平技术的研究仍备受大家的关注。多电平技术避免了器件的直接串联,具有输出电压高,谐波含量低,电压变化率小,开关频率低等优点。多电平技术实现的关键在于如何实现大量的SPWM控制信号。本文针对这个问题进行研究和探讨,利用DSP和CPLD两大控制器来实现多电平SPWM,并最终给出实测波形图。
2 总体设计方案
2.1单元串联多电平变频器拓扑结构介绍
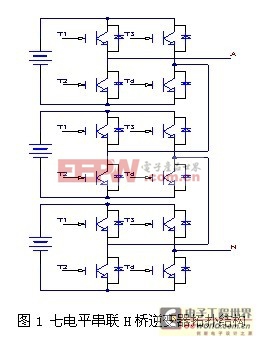
单元串联多电平变频器的拓扑结构简单,易于模块化,可以根据系统对输出电压、电平数的要求确定功率单元的级数。如图1所示,七电平H桥串联逆变器拓扑结构图,其单相电压是由三个功率单元组成,每个功率单元均为H桥逆变电路结构,输出端依次串联在一起,并利用SPWM信号控制功率单元中开关器件的通与断(即控制功率单元的输出),最终实现多电平电压的叠加输出。
2.2载波移相控制理论
一般来说,N电平的逆变器调制,需要N-1个三角载波。移相载波调制法中,所有三角波均具有相同的频率和幅值,但是任意两个相邻载波的相位要有一定的相移,其值为
(1) 
调制信号通常为幅值和频率都可调节的三相正弦信号。通过调制波和载波的比较,可以产生所需要的开关器件的驱动信号[1]。
但在数字化实现中,载波移相法一般不是由一个调制波和一组经过相移的载波比较生成,而是由调制波和一个载波进行比较之后,再进行一定的延时得到各个功率单元的SPWM控制信号。在本系统中采用此种方法来实现多路SPWM的控制信号。
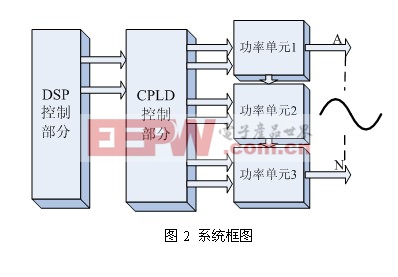
根据对以上概念的理解和分析,在本系统中,采用DSP+CPLD来完成多路SPWM控制信号的实现。其中由DSP控制器实现单相电压中的第一级功率单元两桥臂控制信号,并由CPLD来实现对这两路控制信号的移相延时,进而实现单相电压中各个功率单元的SPWM控制信号(即移相后信号)。系统原理框图如下图2所示:
1 引言
随着电力电子技术和电力半导体技术的迅速发展,中压大功率传动设备在石油化工、矿山开采、轧钢和冶金、运输等领域得到了广泛的应用,不仅提高了资源的利用率,同时还降低了生产的成本,其中变频器扮演着重要的角色。虽然其电路的拓扑结构和控制技术已经比较成熟,但多电平技术的研究仍备受大家的关注。多电平技术避免了器件的直接串联,具有输出电压高,谐波含量低,电压变化率小,开关频率低等优点。多电平技术实现的关键在于如何实现大量的SPWM控制信号。本文针对这个问题进行研究和探讨,利用DSP和CPLD两大控制器来实现多电平SPWM,并最终给出实测波形图。
2 总体设计方案
2.1单元串联多电平变频器拓扑结构介绍
单元串联多电平变频器的拓扑结构简单,易于模块化,可以根据系统对输出电压、电平数的要求确定功率单元的级数。如图1所示,七电平H桥串联逆变器拓扑结构图,其单相电压是由三个功率单元组成,每个功率单元均为H桥逆变电路结构,输出端依次串联在一起,并利用SPWM信号控制功率单元中开关器件的通与断(即控制功率单元的输出),最终实现多电平电压的叠加输出。
2.2载波移相控制理论
一般来说,N电平的逆变器调制,需要N-1个三角载波。移相载波调制法中,所有三角波均具有相同的频率和幅值,但是任意两个相邻载波的相位要有一定的相移,其值为
(1)
调制信号通常为幅值和频率都可调节的三相正弦信号。通过调制波和载波的比较,可以产生所需要的开关器件的驱动信号[1]。
但在数字化实现中,载波移相法一般不是由一个调制波和一组经过相移的载波比较生成,而是由调制波和一个载波进行比较之后,再进行一定的延时得到各个功率单元的SPWM控制信号。在本系统中采用此种方法来实现多路SPWM的控制信号。
根据对以上概念的理解和分析,在本系统中,采用DSP+CPLD来完成多路SPWM控制信号的实现。其中由DSP控制器实现单相电压中的第一级功率单元两桥臂控制信号,并由CPLD来实现对这两路控制信号的移相延时,进而实现单相电压中各个功率单元的SPWM控制信号(即移相后信号)。系统原理框图如下图2所示:
3 DSP控制部分
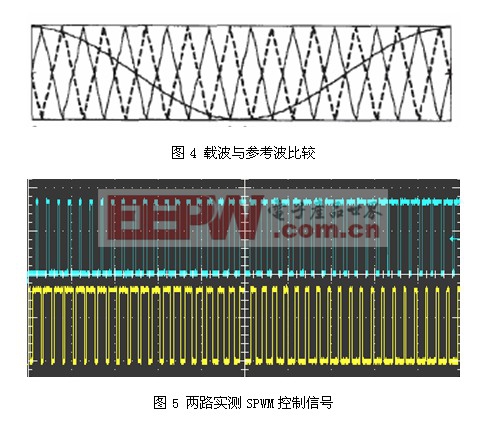
DSP控制部分主要任务是实现单相电压中第一级功率单元的两路控制信号。如图3所示,这两路控制信号分别控制左桥臂Q1和右桥臂Q3两开关器件的通与断,为避免同一桥臂上的两个开关器件同时导通,使Q2和Q4控制信号分别为Q1和Q3信号的互补信号,由于器件的动作需要一定时间,因此Q1和Q2、Q3和Q4信号间需要增加一定的死区延时时间,在本系统中,死区延时的时间由硬件完成。
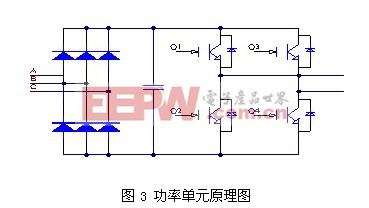
功率单元左桥臂Q1的控制信号由三角载波与参考波(正弦波)比较得到,当参考波大于载波时,输出高电平,Q1导通,Q2截止;反之,输出低电平,Q1截止,Q2导通。Q1信号取反后得到Q2信号。左桥臂Q3的控制信号由互差180。的三角载波与参考波(正弦波)比较得到,当参考波大于载波时,输出高电平,Q3导通,Q4截止;反之,输出低电平,Q3截止,Q4导通。Q3信号取反后得到Q4信号。载波与参考波的比较过程参考图4,两桥臂控制信号的实测波形如图5。将参考波分别向左移或向右移动120。并与三角载波相比较便可得到其它两相电压的第一级功率单元的控制信号。
根据对以上内容的分析,在本系统中采用了TI公司的DSP TMS320F2812作为该部分的控制核心。其内核为32位,运行速度可以达到150MIPS,足够完成一些较复杂的控制算法。同时其有6路独立的PWM输出、2个异步串行通讯口、16通道12位AD输入,内置了36K的RAM和256K的Flash存储器,可以存放较大规模的程序。在主控制电路中,只需要在该DSP的基础上配合一些简单的外围电路即可实现所需的6路SPWM控制信号。
4 CPLD控制部分
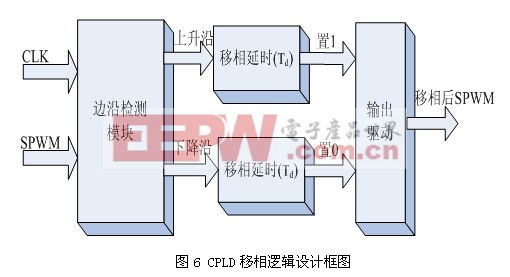
CPLD控制部分主要任务是对第一级功率单元H桥左、右桥臂控制信号进行移相(即上文所提到的延时),进而得到以后各级功率单元的左、右桥臂的控制信号。该部分设计的关键是信号的边沿检测和移相延时两部分。如下图6所示,首先,CPLD对SPWM进行边沿信号检测,当检测到上升沿(或下降沿)到来后,再进行Td时间的延时,最后输出置1(或0),以达到移相的目的。
边沿信号检测可以利用边沿触发的触发器去检测上升沿或下降沿,但是这种方式对于边沿的检测过于敏感,系统中的一个尖峰干扰将会导致边沿检测的误判,为解决这个问题,我们进行多次采样,比较前后几次采样的结果,再来判别边沿是否到来。这种方法对抗干扰起到了一定的作用,增强了系统的健壮性、稳定性。
移相延时部分最重要的是对延时时间的选择,延时时间长或短都会影响到系统的性能,本设计中,第二级功率单元的延时时间根据公式(2)(公式内容仅供参考)计算得到(以后各级功率单元的延时时间相应的增加Td即可):
(2) 










评论