基于PWM技术的直流电机控制系统

1.直流电机PWM调速控制原理
众所周知,直流电动机转速公式为【1】:
n=(U-IR)/Kφ
其中U为电枢端电压,I为电枢电流,R为电枢电路总电阻,φ为每极磁通量,K为电动机结构参数。
直流电机转速控制可分为励磁控制法与电枢电压控制法。励磁控制法用得很少,大多数应用场合都使用电枢电压控制法。随着电力电子技术的进步,改变电枢电压可通过多种途径实现,其中脉冲宽度调制 (PWM)便是常用的改变电枢电压的一种调速方法。其方法是通过改变电机电枢电压接通时间与通电周期的比值(即占空比)来调整直流电机的电枢电压U,从而控制电机速度。
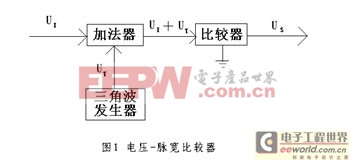
PWM的核心部件是电压-脉宽变换器,其作用是根据控制指令信号对脉冲宽度进行调制,以便用宽度随指令变化的脉冲信号去控制大功率晶体管的导通时间,实现对电枢绕组两端电压的控制。
电压-脉宽变换器结构如图1所示,由三角波发生器、加法器和比较器组成。三角波发生器用于产生一定频率的三角波UT,该三角波经加法器与输入的指令信号UI相加,产生信号UI+UT,然后送入比较器。比较器是一个工作在开环状态下的运算放大器,具有极高的开环增益及限幅开关特性。两个输入端的信号差的微弱变化,会使比较器输出对应的开关信号。一般情况下,比较器负输入端接地,信号UI+UT从正端输入。当UI+UT>0时,比较器输出满幅度的正电平;当UI+UT<0时,比较器输出满幅度的负电平。
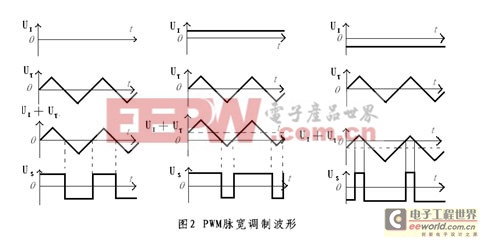
电压-脉宽变换器对信号波形的调制过程如图2所示。由于比较器的限幅特性,输出信号US的幅度不变,但脉冲宽度随UI的变化而变化,US的频率由三角波的频率所决定。
当指令信号UI=0时,输出信号US为正负脉冲宽度相等的矩形脉冲。
当UI>0时,US的正脉宽大于负脉宽。
当UI<0时,US的正脉宽小于负脉宽。
当UI≥UTPP/2时(UTPP是三角波的峰值),US为一正直流信号;当UI≤UTPP/2时,US为一负直流信号。
2.直流电机驱动控制总流程图
直流电机驱动控制电路分为控制信号电路、脉宽调制电路、驱动信号放大电路、H桥功率驱动电路等部分,控制总流程如图3所示。
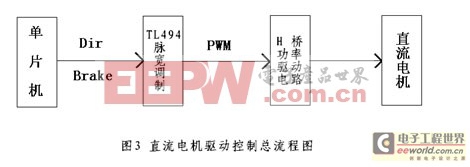
由图3可以看出,首先由单片机发出电机逻辑控制信号,主要包括电机运转方向信号Dir,电机调速信号PWM及电机制动信号Brake,然后由TL494进行脉宽调制,其输出信号驱动H桥功率电路来驱动直流电机。其中H桥是由4个大功率增强型场效应管构成的,其作用是改变电机的转向,并对驱动信号进行放大。
3. TL494脉冲宽度调制电路
3.1 TL494各管脚功能。
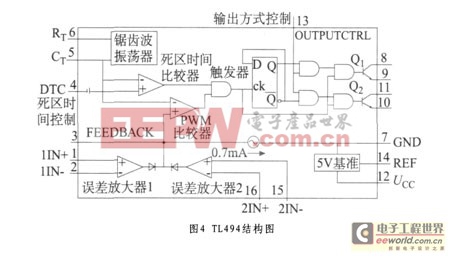
在实现电机PWM控制的电路中,本系统选用TL494芯片,其内部电路由基准电压产生电路、振荡电路、间歇期调整电路、两个误差放大器、脉宽调制比较器以及输出电路等组成。,共16个管脚,其功能结构如图4所示。
TL494芯片广泛应用于单端正激双管式、半桥式、全桥式开关电源。其片内资源有【2】:
集成了全部的脉宽调制电路。
片内置线性锯齿波振荡器,外置振荡元件仅两个(一个电阻和一个电容)。
内置误差放大器。
内止5V参考基准电压源。
可调整死区时间。
内置功率晶体管可提供500mA的驱动能力。
推或拉两种输出方式。
3.2工作原理简述
TL494是一个固定频率的脉冲宽度调制电路,内置了线性锯齿波振荡器,振荡频率可通过外部的一个电阻和一个电容进行调节,其振荡频率如下:
输出脉冲的宽度是通过电容CT上的正极性锯齿波电压与另外两个控制信号进行比较来实现。功率输出管Q1和Q2受控于或非门。当双稳触发器的时钟信号为低电平时才会被选通,即只有在锯齿波电压大于控制信号期间才会被选通。当控制信号增大,输出脉冲的宽度将减小。
控制信号由集成电路外部输入,一路送至死区时间比较器,一路送往误差放大器的输入端。死区时间比较器具有120mV的输入补偿电压,它限制了最小输出死区时间,约等于锯齿波周期的4%,当输出端接地,最大输出占空比为96%,而输出端接参考电平时,占空比为48%。当把死区时间控制输入端接上固定的电压(范围在0—3.3V之间)即能在输出脉冲上产生附加的死区时间。
该芯片具有抗干扰能力强、结构简单、可靠性高以及价格便宜等特点。
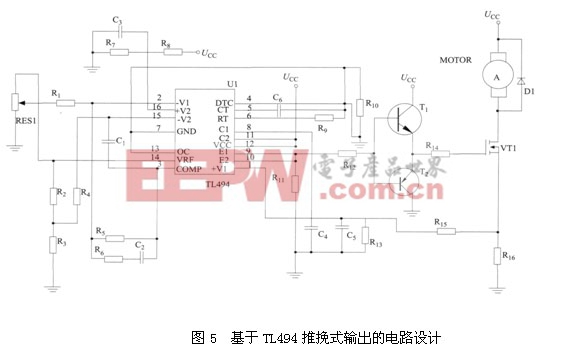
3.3基于TL494推挽式输出的电路设计
该控制系统的具体实现电路如图5所示。系统功率驱动选用MOSFET,其输入阻抗很高,可直接由晶体三极管驱动。TL494的13脚用来控制输出模式。在该系统中,选择将该端输入为低电平,这时TL494内触发器Q1和Q2不起作用,两路输出相同,其频率和振荡器频率相同、最大占空比为98%。
4.H桥功率驱动原理与电路设计
驱动信号在经TL494的脉宽调制后,在直流电机控制中常用H桥电路作为驱动器的功率驱动电路。这种驱动电路可方便地实现直流电机的四象限运行,分别对应正转、正转制动、反转、反转制动。由于功率MOSFET是压控元件,具有输入阻抗大、开关速度快、无二次击穿现象等特点,满足高速开关动作需求,因此常用功率MOSFET构成H桥电路的桥臂。H桥电路中的4个功率MOSFET分别采用N沟道型和P沟道型,而P沟道功率MOSFET一般不用于下桥臂驱动电机,上下桥臂分别用2个P沟道功率MOSFET和2个N沟道功率MOSFET。其电路图如图6所示。
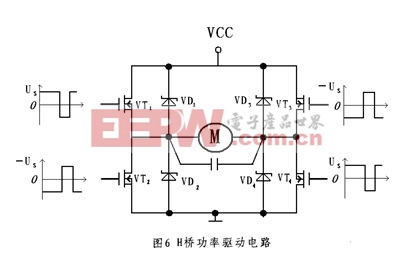
图图中VCC为电机电源电压,,输出端并联一只小电容,用于降低感性元件电机产生的尖峰电压。4个二极管为续流二极管,可为线圈绕组提供续流回路。当电机正常运行时,驱动电流通过主开关管流过电机。当电机处于制动状态时,电机工作在发电状态,转子电流必须通过续流二极管流通,否则电机就会发热,严重时甚至烧毁。US来自TL494的输出, -US可通过对US反相获得。当US>0时,VT1和VT4导通,US<0时,VT2和VT3导通。
按照控制指令的不同情况,该功放电路及其所驱动的直流伺服电机可以有以下四种工作状态:
1)当UI=0时,US的正负脉宽相等,直流分量为零,VT1和VT4的导通时间和VT2和VT3导通时间相等,通过电枢绕组中的平均电流为零,电动机不转。
2)当UI>0时,US的正脉宽大于负脉宽,直流分量大于零,VT1和VT4的导通时间大于VT2和VT3导通时间,通过电枢绕组中的平均电流大于零,电动机正转,且随着UI增加,转速增加。
3) 当UI<0时,US的直流分量小于零,VT1和VT4的导通时间小于VT2和VT3导通时间,通过电枢绕组中的平均电流小于零,电动机反转,且反转转速随着UI的减小而增加。
4)当UI≤UTPP/2或UI≤-UTPP/2时,US为正或负的直流信号,VT1和VT4于或VT2和VT3始终导通,电机在最高转速下正转或反转。
结束语
本文所述的直流电机调速系统以TL494为核心,构成H桥双极式PWM直流电机调速系统,较好地实现了对直流电机的速度控制,并具有精度高、响应速度快、稳定性好等优点。从实际运用来看, TL494用于直流电机的PWM调速,不仅具有良好的性能,而且经济可靠,因而具有很大的实用价值。

dc相关文章:dc是什么
手机电池相关文章:手机电池修复
pwm相关文章:pwm是什么
比较器相关文章:比较器工作原理
伺服电机相关文章:伺服电机工作原理
pwm相关文章:pwm原理
脉冲点火器相关文章:脉冲点火器原理 脉宽调制相关文章:脉宽调制原理






评论