基于STC89C52单片机的体操机器人系统设计

1 引言
模仿人的形态和行为而设计制造的机器人可称为仿人型机器人,一般分别或同时具有与人类似的四肢和头部。仿人机器人研究集机械、电子、计算机、材料、传感器、控制技术等多门科学于一体,代表着一个国家的高科技发展水平。因此,世界发达国家都不惜投入巨资进行开发研究。体操机器人具有明显的类人特征,具有可独立运行的双臂和双腿,其中手臂部分具有不少于3个自由度,双腿部分具有不少于2个自由度。可实现双手俯卧撑,倒立劈叉,左、右单手俯卧撑,左、右侧滚翻360°,前、后滚翻360°等较为复杂的体操动作,是研究仿人形机器人技术的基础。
2 体操机器人的控制电路设计
本文设计的体操机器人控制部分主要采用STC89C52RC型单片机小系统作为控制核心,该型单片机是宏晶科技推出的新一代超强抗干扰/高速/低功耗的单片机,指令代码完全兼容传统8051单片机。其性能如下:
① 12时钟/机器周期和6时钟/机器周期任意选择。
② 工作频率范围:0-40MHz,实际工作频率可达48MHz。
③ 工作电压:5V-3.4V(5V单片机)/3.8-2.0V(3V单片机)。
④ 片上集成1280字节/512字节RAM。
⑤ 通用I/O口(32/36个)。P0口是开漏输出,作为总线扩展用时,不用加上拉电阻,作为I/O口时,需要加上拉电阻。
⑥ ISP(在系统可编程)/IAP(在应用可编程),无需专用编程器/仿真器,可通过串口(P3.0/P3.1)直接下载用户程序。
⑦ 工作温度:0-75℃/-40-+85℃。⑧ 封装:PDIP-40,PLCC-44、PQFP-44。
体操机器人控制小系统的PCB板设计图如图1所示:
该体操机器人的关节驱动电机使用的是辉盛MG996通用型舵机。MG996型舵机是辉盛最新大扭力标准金属齿舵机。速度,拉力和精确度都有相应提高,是目前市场上性价比最高的大扭力通用型舵机之一。其性能如下:
① 产品净重:55g。
② 产品尺寸:40.7×19.7×42.9mm。
③ 产品拉力:10.5kg/cm(4.8V),13kg/cm(6V)。
④ 反应速度:0.20sec/60degree(4.8v),0.17sec/60degree(6.0v)。
⑤ 工作电压:4.8-7.2V。
⑥ 工作温度:0℃-55℃。
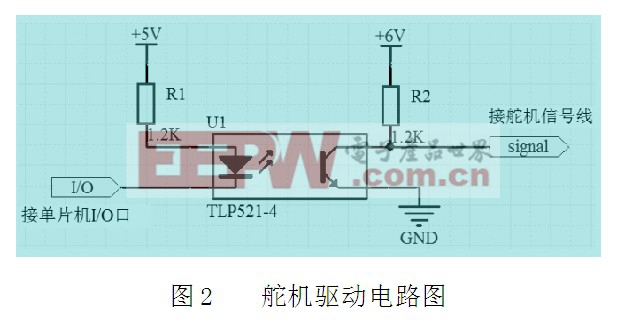
其MG996型舵机的驱动方式也是采用PWM方式,因此在考虑驱动电压为6V时,输出扭力最大的使用条件,设计了采用TLP521型光电耦合器的驱动电压放大电路,其电路如图2所示:












评论