无损快速智能充电器的设计方法

根据马斯定理,对电池进行快速无损充电,充电电流应等于或接近于当前电池所能接受的电流大小,以保证析气率最低,减少快速充电过程中对电池的损害。近来,先进的智能控制技术被引入到快速充电技术中,用于停充电控制或充电模式选择,提高控制精度和充电效率;但没有考虑电池自身的充电特性,缺乏自适应能力,不能跟踪电池充电特性的改变而动态调节充电电流,导致充电电流大于电池能接受的电流,致使温升过高对电池造成损害。为此,需要设计一种新型的智能充电器,能对电池进行安全、无损、快速充电。
深入研究快速充电理论,从镍镉电池特性出发,创新性地提出引入自适应模糊神经网络(ANFIS)对电池在不同荷电状态下的可接受电流进行预测,从而调整实际充电电流;同时,充电中加入负脉冲去极化。在此基础上,采用英飞凌公司的单片机XC164CM及外围接口电路提出一种新型的快速无损智能充电器的设计方案。
1 镍镉电池充电过程特性研究
单节镍镉电池的充电曲线如图1所示。整个充电过程大致可分为4个阶段。
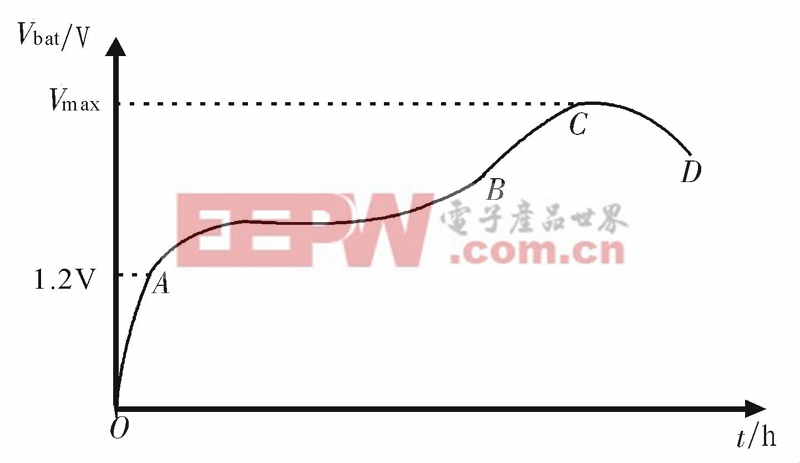
图1 镍镉电池充电特性曲线
当电池的端电压低于1.2 V达到A点时,应立即停止放电,放电过深将导致温升大。在充电过程中,主要的充电阶段是A-B段,整个电池70%以上的能量都在这个阶段充入,电压上升速率慢。同时,在A-B段电化学反应以一定的速率氧气,氧气又以同样的速率与氢气复合,所以,电池内部的温升和气体压力都较低。这段时间适宜采用大电流快速充电,但其充电电流必须小于电池的可接受电流,否则将产生大量析气,降低充电效率,温升过高,致使损害电池。而在B-C段电池的端电压上升很快,这时电池内阻抗增加,适宜减小充电电流。在C-D段则进入停充阶段,注意及时进行停充检测并阶段进行,在O-A阶段采用小电流预充电;当达到A点时,进入快速充电阶段,这里采用大电流脉冲智能充电;在B-C段小电流补充充电,最后到C-D段停充检测。
2 快速无损充电策略
文献中提到蓄电池可以简单的看作一个超大阻容器,电池的充电过程就可以看作一个RC电路的充电过程,其时间常数τ表征了充电的快慢,也就相当于马斯曲线中的衰减比α,则有τ=1/α。充电中电池的可接受电流的大小只与初始电流I0有关,当t=3τ后,电池的可接受充电电流约为I0/20;当充电到t=5τ时,其时电池的可接受电流已经很小。
由此,提出利用自适应模糊神经网络ANFIS预测电池的可接受电流。在电池的快速充电过程中,根据电池的荷电状态预测其可接受电流,保证充电电流符合马斯的最佳充电曲线,析气率低,对电池无损害。ANFIS预测电池的可接受电流基本思想是:在充电过程中,动态检测电池的状态参数作为ANFIS预测模型的输入,通过模糊推理得出当前的可接受电流ick,当预测值ick与期望值icp的误差不满足要求时,自适应模糊控制器产生控制响应,通过神经网络的自学习能力,自适应地修正隐含层的输出结果,更新各层之间的连接权值,优化模糊参数,重新计算输出结果,直至误差满足要求才输出预测结果,从而改变当前的充电电流,使实际的充电电始终逼近或等于可接受电流。同时,引入负脉冲充电消除极化效应。
3 硬件设计
系统硬件电路主要包括电源电路、充电/放电电路、电流检测和保护控制电路的3部分。
3.1 电源电路
为了缩小体积,提高系统的功率密度,选用PowerIntegrations公司生产的TOPSwitch-Ⅱ系列TOP224Y设计电源电路。该系列开关电源芯片是将PWM控制电路、保护电路和功率开关集成到同一芯片上,具有集成度高、工作效率高和外围电路设计简单的特点,非常方便于150 W以下的反激型开关电源设计。电源电路如图2所示。
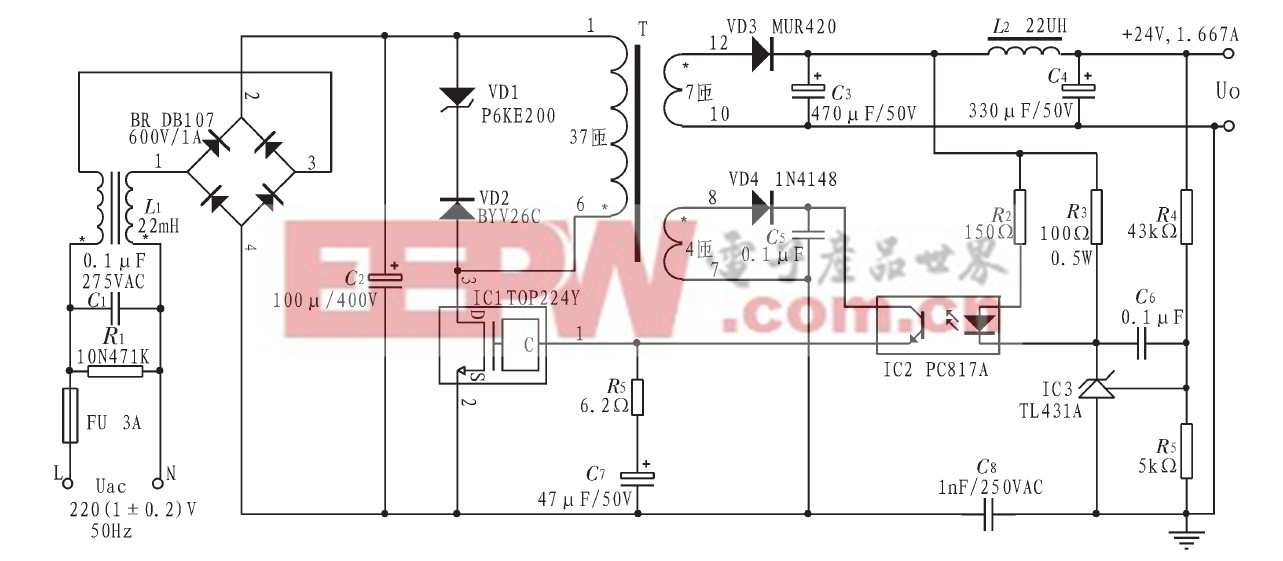
图2 24V/40W电源电路
设计的性能指标如下:
1)输入电压:Uac=220(1±20%)V;2)输入电压频率:f=50(1±5%)Hz;3)输出电压/最大输出功率:24 V/40 W;4)开关电源效率:η≥80%.
交流输入电压Uac经过压敏电阻R1滤除交流电压中的尖峰脉冲后,经电磁干扰(EMI)滤波器(C1,L1)滤除差模和共模干扰。之后经过BR全波整流及C2滤波后产生直流高压,给高频变压器的初级绕组供电。P6KE200(瞬态电压抑制器)和BYV26C(超快恢复二极管)构成钳位电路,用于吸收在TOP224Y关断时由高频漏感产生的尖峰电压,并能衰减振铃电压,对漏极起到保护作用。次级电路经过VD3、C3、L2和C4整流滤波输出24 V的电压U0.由TL431A构成的外部误差放大器实现U0的动态稳压,当输出电压发生波动,经R4、R5分压后得到取样电压,就与TL431A内的基准电压(2.5 V)进行比较产生一个外部控制信号,再通过线性光耦合器PC817A改变TOP224Y控制电流,进而调节占空比使U0趋于稳定。C7滤除加在控制端的尖峰电压,还与R2、R5一起对控制回路进行补偿。R3为最小输出负载,用于提高轻载时的电压稳定度。









评论