基于单片机及VC++的步进电机控制系统设计

1 引言
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下, 电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给 电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周 期性的误差而无累积误差,使得在速度、位置等控制领域,用步进电机来控制变的非常的简 单[1]。本文设计了一种基于AT89S52 单片机和VC++的步进电机控制系统,可以实现对步进 电机的基本控制及状态实时显示。
2 系统组成
使用、控制步进电机必须由环形脉冲源、功率放大电路等部分组成控制系统,脉冲信号 一般由单片机或CPU产生,一般脉冲信号的占空比为0.3-0.4左右,电机转速越高,占空比则 越大。功率放大是驱动系统最为重要的部分。步进电机在一定转速下的转矩取决于它的动态 平均电流而非静态电流,平均电流越大,电机力矩越大,要达到平均电流大,这就需要驱动 系统尽量克服电机的反电势。因而不同的场合采取不同的驱动方式。到目前为止,驱动方式 一般有以下几种:恒压、恒压串电阻、高低压驱动、恒流等[2]。
本文设计系统中,脉冲信号由单片机AT89S52产生并分配给步进电机各相,功率放大部分由驱动电路完成,系统结构框图如图1所示。
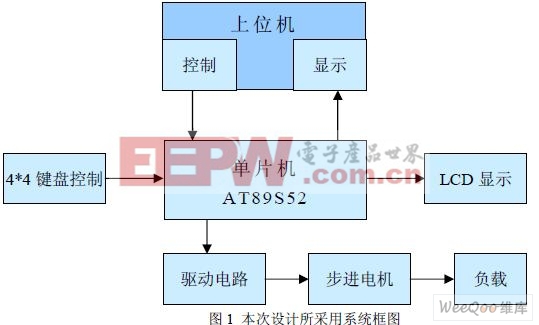
本文所设计系统中,步进电机模块采用35BY48S03永磁式步进电机,用户利用4*4键盘或上位机的控制界面实现指令输入,采用上位机或1602字符型液晶模块实时显示运行状态。
3 硬件设计
3.1 单片机最小系统电路
单片机的最小系统电路包括时钟电路和复位电路。本文所设计系统中,时钟电路采用内 部振荡方式,所得的时钟信号比较稳定,实用电路中使用较多[3]。复位电路作用是使单片机 的片内电路初始化,使单片机从一种确定的状态开始运行。复位电路采用2种基本形式:上 电复位、开关复位。
3.2 键盘电路
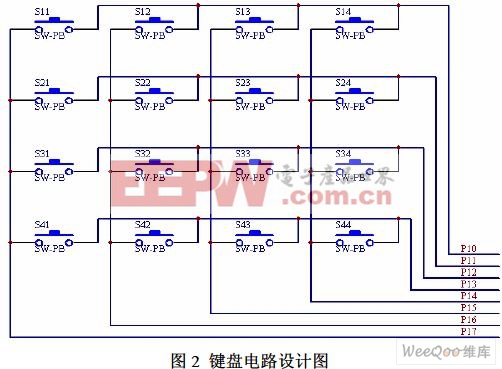
设计P1口接4*4键盘,键盘电路图如图2所示:
3.3 电机驱动电路
35BY48S03型步进电机接线图如图3所示,从图中可以看出,电机共有四组线圈,四组线圈的一个端点连在一起引出,这样一共有5根引出线。要使步进电机转动,只要以一定的 次序轮流给各引出端通电即可,加电的方式可以有多种,包括单相驱动、双相驱动、单-双 相驱动等,相应步进角有整步和半步区分。在本文设计的系统中,采用单相驱动和单-双相 驱动两种加电方式驱动步进电机运转。
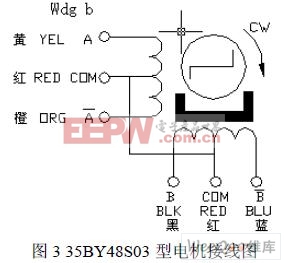
根据该电机参数,不难设计出驱动电路,因其工作电压为12V,最大电流为0.26A,因 此用一块开路输出达林顿驱动器(ULN2003)作为驱动,通过P2.7-P2.4来控制各线圈的接通与 切断。如果要改变电机的转动速度只要改变两次接通之间的时间,而要改变电机的转动方向, 只要改变各线圈接通的顺序[4]。

陀螺仪相关文章:陀螺仪原理











评论