基于MSP430 单片机的光电跟踪伺服系统的研究方案

研究设计中利用光敏感器件对特定光波长范围的光信号敏感原理,将四象限光电位置探测器与MSP430系列单片机相结合,根据四象限光电探测器输出电压与光斑位置的线性关系,通过数字PID闭环控制输出电压调节单片机输出PWM 的占空比来实现精确稳定的搜寻和小范围跟踪目标。
0 引言
光电跟踪系统是以光电器件(主要是激光器和光电探测器)为基石,将光学技术、电子/微电子技术和精密机械技术等融为一体,形成具有特定跟踪功能的装置。
目前国内外较先进的光电跟踪系统多以激光测距仪、电视跟踪仪和红外跟踪仪三位一体为核心构成。采用机械方法实现跟踪系统控制起来还不太灵敏。对于一个光电追踪系统,一般通过目标识别、位置信号检测、位置信号处理、PID伺服控制计算、驱动控制、位置反馈、目标不间断跟踪,完成特定跟踪任务。而与之配套的目标识别检测处理与PID 伺服控制实现是非常重要的部分,是保证整个系统能否正常工作的关键。
为更好地实现精确的跟踪伺服系统,本方案中使用MSP430 单片机完成对目标定位跟踪的PID 闭环控制,采用S066A 的国产四象限探测对目标进行识别跟踪定位。MSP430 单片机是美国TI(德州仪器)公司近年推出的16 位高性能混合信号处理器。由于它具有处理能力强、运算速度快、集成度高、外部设备丰富、超低功耗等优点,因此在许多领域内都得到了广泛的应用。S066A国产四象限探测器光谱响应范围在400~1 100 nm,它的峰值波长为940 nm,它具有较高的灵敏度和精确度,广泛运用于位置检测,光学定位,距离探测等方面。
本研究方案的意义在于一方面对四象限探测器件以及新式低功耗高集成的微处理器的使用和推广;另一方面探索一种新的机械对准结构设计以及为低成本跟踪系统的研制提供一种可行性方案。
1 总体设计方案
整个系统的设计如图1 所示,主要由机械传动设计和系统电路设计两部分组成。
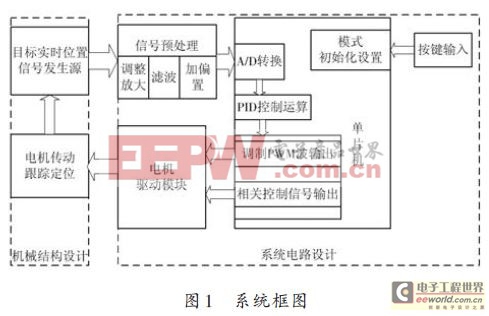
机械部分中目标实时位置信号发生源采用四象限探测器对目标进行定位,并输出包含目标位置信息的4 路电信号,电机传动跟踪定位则是根据四路位置信号来驱动探测器所在的定位面板对目标进行搜索和锁定。机械部分将探测和定位集为一体,目标可见即可识,电机与定位面板的传动以角位移为变量进行快速方便的传动。系统电路设计部分中MSP430F169 片内集成了多个功能模块。
本设计利用其作为处理核心,其片内A/D模块实现模拟信号与数字信号的转换。一方面Timer 对时钟进行分频从而提高时钟频率,使A/D获得更快的采样率或转换速度,以保证A/D 转换的精度;另一方面Timer的输出端单元可作为PWM信号发生器根据片内编程进行PID 高速运算处理所得结果产生PWM 输出控制信号,设置简单方便简化了电路的设计,进而降低了系统设计的复杂性。接收前端的位置信号使用低偏置,高精密度放大器对信号进行调整,利用滤波器对位置信号进行优化,以满足更好的精度和定位要求。在控制信号输出端采用现有的电机驱动芯片确保电机的稳定运行。基于总体设计方案,本文将其划分为4个不同但又彼此相互作用的4个方面来实现该研究。具体包括硬件电路设计、机械模拟模型设计、PID算法设计以及软件编程。
2 硬件模块设计
2.1 硬件电路设计原理
依据总体设计方案,硬件电路主要由电源模块、四象限信号放大处理模块、系统控制模块、电机驱动模块以及相关辅助模块构成(见图2)。
四象限探测器可探测波长范围(380~1 100 nm),其原理是将光照强度转换为电流信号。但由于其输出电流信号较小,四象限探测器的预处理模块电路实现将电流信号经放大和运算处理,并将电流转化为单片机A/D能够采集到电压范围0~2.5 V.采样的数字信号经单片机内的数字滤波和算法的运算,进而控制PWM波的占空比来调节电机的速度。
2.2 机械模拟机构实验设计原理
模拟机构设计灵感源于地动仪的设计原理,采用两个不同的轴来调节两个不同但相关的平面实现四象限探测器的大范围搜寻目标的目的,模型图如图4所示。












评论