PLC的PID运算及运动控制探讨

1、系统初始化:一般小型PLC的系统初始化主要是进行初始化、设置、查找扩展模块等;
2、扫描输入:扫描IO输入信号;
3、执行逻辑:根据用户PLC程序执行逻辑;
4、家务管理:PLC诊断、维护和其它系统程序执行;
5、扫描输出:将逻辑执行的结果输出;
6、通信管理单元:通信服务程序,响应编程软件和其它通信任务。
PLC运行方式:
由上面可以看到PLC的运行是一种循环扫描的运行方式,实际上PLC还有定时扫描和中断扫描共三种扫描方式。
循环扫描:PLC按上图循环执行;
定时扫描:PLC根据用户设置的时间定时扫描,比方说50ms扫描一次,使用这种扫描方式,用户需要保证用户程序在设定时间内一定能扫描完毕,一般PLC使用定时中断和子程序结合起来实现这个功能(这种情况下与中断扫描方式并无不同),但在IO扫描方面会有一些细微的不同,很可能会用到立即刷新IO的功能块UpData_IO。
中断扫描:中断扫描根据外部或者内部中断的激活中断扫描程序的运行。比方说外部IO中断、高速计数中断、定时中断等。
十九、PID——温控、变频
PID(Proportional, Integral andDerivative)是闭环控制中最常用的一种算法,在包括温控、水泵、张力、伺服阀、运控等行业得到了广泛的应用,但因为每个应用的对象特性都不一样,这就要求调试工程师允分了解PID的控制原理,只有这样我们才能把PID的应用好。
PID原理:
PID是由比例、微分、积分三个部分组成的,在实际应用中经常只使用其中的一项或者两项,如P、PI、PD、PID等。
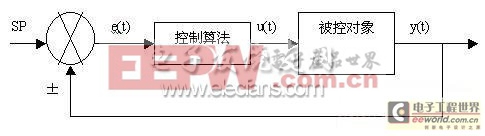
从控制原理来说,当一个控制对象,我们希望控制的输出达到我们设定的值,我们通常会使用开环或者闭环控制,如果控制对象的响应很稳定不会受到其它环节的影响,我们可以选用开环控制。反之如果被控对象受到设定值、负载或者源端的影响而产生波动,我们应该选用闭环控制。下图是一个温控的原理图:
PID执行周期(1/10秒) 〔范例〕

比例控制(P):
比例控制是最常用的控制手段之一,这也是最符合人的感观的一种控制,比方说我们控制一个加热器的恒温100度,当开始加热时,离目标温度相差比较远,这时我们通常会加大加热,使温度快速上升,当温度超过100度时,我们则关闭输出,通常我们会使用这样一个函数
e(t) = SP – y(t);
u(t) = e(t)*P
SP——设定值
e(t)——误差值
y(t)——反馈值
u(t)——输出值
P——比例系数
滞后性不是很大的控制对象使用比例控制方式就可以满足控制要求,但很多被控对象中因为有滞后性。
比方说塑胶挤出机,如果设定温度是200度,当采用比例方式控制时,如果P选择比较大,则会出现当温度达到200度输出为0后,温度仍然会止不住的向上爬升,比方说升至230度,当温度超过200度太多后又开始回落,尽管这时输出开始出力加热,但温度仍然会向下跌落一定的温度才会止跌回升,比方说降至170度,最后整个系统会稳定在一定的范围内进行振荡。
如果这个振荡的幅度是允许的比方说家用电器的控制,那则可以选用比例控制,很多传统的家用空调和我们常会发现家用空调始终是间歇工作的,当开始制冷时我们通常会感到越来越冷,当空调停止时又会感到温度越来越高,它采用的则是比例控制
比例值太小时的控制效果图:
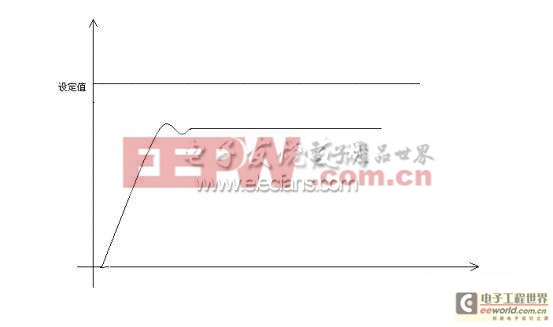
如果比例值太小,反馈值始终到不了设定值(静态误差)就达到了平衡(如果是加热的话就是说散热与P*e(t)加热达到了一个平衡)
比例值太大时的控制效果图:
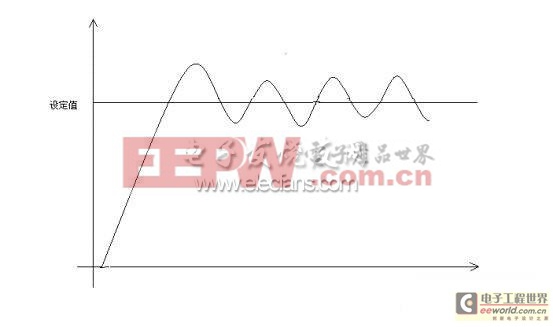
如果比例值太大,则被控对象会出上图所示的振荡,当然振荡点不一定是在设定值,









评论