基于STM32F103的角磨机开关磁阻电机控制器的设计*
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询
*院地产学研协同创新基金-电动角磨机用高速开关磁阻电机驱动系统(2019-CXY24)
本文引用地址:https://www.eepw.com.cn/article/202107/427129.htm作者简介:马建辉(1983—),男,硕士,高级工程师,研究方向为电机控制、新能源。E-mail:majialong@aliyun.com。
0 引言
目前,市场上的角磨机主要使用三种电机作为其驱动电机——单相串励电机、异步电机和永磁同步电机。其中,单相串励电机具有低速大扭矩,过载能力强的特点,但必须使用换向器,使用场合受限且转速不能过高。异步电机结构简单,但需要消耗滞后的无功,电机效率相对较低,轻载时调速性能不佳。永磁同步电机高效耐用,但永磁体成本很高。
开关磁阻电机(SRM)是一种双凸极电机,结构简单,坚固耐用,效率高,启动转矩大,可以满足电动角磨机大扭矩、转速范围宽广、灵活的速度及转向控制等要求[1]。
本文采用开关磁阻电机作为电动角磨机的驱动电机,基于STM32F103 设计了开关磁阻电机控制器,实现了SRM的启停控制、电流斩波控制和角度位置控制。下面从电机、控制器硬件和软件中的若干关键技术描述基于STM32F103 的SRM 控制器设计。
1 电机设计
从成本的角度考虑,经特殊设计的双相电机可以实现自启动,但其转矩脉动较大且无法双向旋转,使用场合受限,综合考虑,本设计选用三相电机,电机参数如表1 所示。

根据表1 提供的电机基本参数,通过多次有限元优化仿真计算,最终确定采用6/4 极定转子方案,定子为6 凸极结构,构成A/B/C 三相绕组,转子为4 凸极结构,该SRM 示意图如图1 所示。

图1 三相6/4极
2 硬件设计
SRM控制器的硬件电路包括控制模块及最小系统、检测模块、电源模块、功率驱动模块4 个部分,硬件结构如图2 所示。

控制模块包括主控制芯片STM32F103 及其最小外围电路。STM32F103 的CPU 主频为72 MHz,能在一定程度上实现较为复杂的算法,同时价格适中,有利于产业化量产。
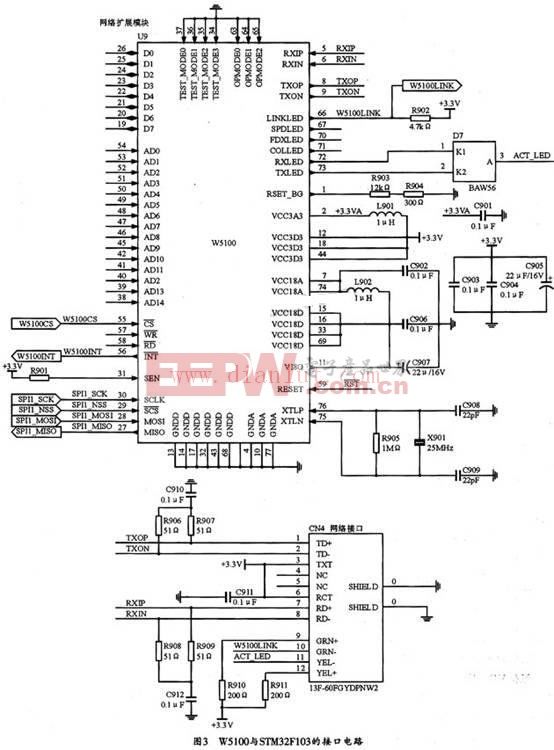
检测模块包括启停按键检测电路、相电流采样及放大电路、霍尔元件检测电路。其中,为了计算方便,相电流采样及放大电路选用5 mΩ(2 个10 mΩ 电阻并联)的采样电阻在H 桥臂下半桥进行采样,然后用运算放大器LM2904 对采样电压进行20 倍放大,使得相电流和ADC 通道电压成10 倍关系,从而简化了程序的计算。相电流的放大电路如图3 所示。

图3 相电流采样电压放大电路
电源模块包括整流模块和DC-DC 转换模块,整流模块包括半波整流电路、电容限流充电电路、滤波电路,用于将输入的AC 220 V 整流,输出310 V 左右的直流母线电压。DC-DC 转换模块包括将310 V 直流电压转换至15 V 的直流斩波电路,以及从15 V 至5 V 和3.3 V的稳压电路。
功率驱动模块采用典型的不对称半桥驱动电路,用IGBT 控制定子绕组的供电,由于该设计中开关磁阻电机要达到24 krpm的最高转速,所以IGBT 需要具备较高的开关频率,故选择开关频率高达150 kHz 的IRGP20B60P。该部分电路如图4 所示。

图4 不对称半桥驱动电路
3 软件设计
3.1 软件结构
由于计算资源及RAM 资源有限,SRM 控制器采用前后台方式进行软件设计。后台进行启停按键检测、相电流采样和转速检测,前台根据检测到的启停按键实现电机启动和停转,根据采集的相电流进行电流斩波控制(CCC)、PID 控制,根据测得的转速执行控制模式在CCC-PID-APC(角度位置控制)之间的切换。软件框架结构如图5 所示。

3.2 控制策略
角磨机运行速度宽泛,最高转速可达24 000 r/m,需要在不同转速下采用不同的控制策略。具体讲,启动及低速时采用电流斩波控制,中速时采用转速+ 电流双闭环PID 控制[2],高速时采用角度位置控制。下面根据电压平衡方程讲述控制策略转换的原因。将电压平衡方程列出如下:

其中,磁链可用电感L 和电流i 的乘积表示,磁链方程为:

因相电感和电流有关且随转子位置角变化,故磁链是电流和转子位置的函数,可将式(1) 改写为:

将式(2) 代入式(3),得:

其中, 是由电流变化引起磁链变化而感应的电动势,称为“变压器电动势”,
是由电流变化引起磁链变化而感应的电动势,称为“变压器电动势”, 是由转子位置变化引起磁链变化而感应的电动势,称为“运动电动势”[3]。
是由转子位置变化引起磁链变化而感应的电动势,称为“运动电动势”[3]。
当转速较低时,运动电动势较低,电流上升速度很快,为了保护电机及功率开关器件,采用电流斩波控制(CCC)来限制电流峰值[4]。
CCC 采用电流滞环控制形式,滞环宽度越小,转矩脉动越小,但开关频率越高,开关损耗越大,经反复试验调节,本文选择滞环宽度为0.2 A。
随着转速的升高,由电流PI 控制器控制电流,随着电机转速的继续升高,运动电动势和变压器电动势逐渐变大,从而限制了电流的上升速度,电流PI 控制器的积分环节达到饱和,失去对电流的控制作用[5],电机进入高速运行阶段,此时由PID 控制方式进入角度位置控制方式。
4 结束语
为了实现电动角磨机全转速范围内的低成本高效运转,选用开关磁阻电机作为其驱动电机,经有限元仿真确定开关磁阻电机的结构参数。基于STM32F103 设计了SRM 控制器软硬件,以前后台的方式实现了关键信号检测及基于转速的控制策略切换。启动及低速阶段采用电流斩波控制提供大转矩同时保护功率器件,中速阶段采用PID 调节控制,高速阶段采用角度位置控制对转速进行调节。该角磨机已经实现量产,运行可靠,具有很高的实用价值。
参考文献:
[1] 张云,王知学,付东山.电动角磨机用开关磁阻电机驱动系统设计[J].电机与控制应用,2017,44(3): 66-70.
[2] 朱孟美,周广旭,宋宁冉.直驱式电动台钻用开关磁阻电机高效控制[J].电机与控制应用, 2019,46(10): 51-57.
[3] 王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,2014.
[4] 臧平宇,张广明,梅磊.轴向磁通开关磁阻电机的电流斩波控制研究[J].电源技术,2016,,40(4): 889-891.
[5] 雷渝,王军,苟斌.一种改进的开关磁阻电机角度位置控制方法研究[J].电力电子技术,2018,52(02): 21-24.
(本文来源于《电子产品世界》杂志2021年7月期)











评论