肢体康复系统中多伺服电机控制单元的设计

摘要:针对目前各类疾病所引起的肢体功能障碍逐年增加而医护人力资源紧缺的情况,本文主要设计了应用于外部肢体康复设备中的多伺服电机控制系统的硬件组成与软件程序。该系统主要包含电源模块,单片机模块,液晶显示模块,按键模块和伺服电机单元。通过单片机内部程序的设定和外部液晶、按键等人机互动模块的输入,多伺服电机系统能依据指令控制机械手臂运动,完成指定动作。康复训练治疗病人通过外部机械手臂的带动,完成自身力量不能完成的训练动作,从而达到康复训练治疗的目的。经过实际检验,该系统能较好的完成既定目标与要求。
本文引用地址:https://www.eepw.com.cn/article/201808/386734.htm随着我国社会经济的不断发展,人民生活水平不断提高,人均平均寿命也大大增长。与此同时,各类疾病所引起的肢体功能障碍也成为中老年群体亟待解决的问题。
应用于肢体康复设备的多伺服电机控制系统是针对肢体功能障碍患者设计的一款电动康复锻炼装置。该装置主要由外部机械骨骼,多伺服电机控制单元,电源模块,主控制单元,人机互动模块组成。其中单片机主控制单元采用Kinetis K60控制多伺服电机系统,进而多伺服电机系统驱动机械手臂,帮助佩戴机械手臂的康复训练者做出预定的康复训练动作。此外,其本身可记忆多种模式以及不同的康复训练动作,以此简化医务人员的相关工作,提高医疗效率。康复训练者在该装置的帮助下做被动康复训练,能大大降低康复训练的难度,减少不必要的人力成本。
1 多伺服电机控制系统硬件设计方案与分析
1.1 硬件总体设计方案与分析
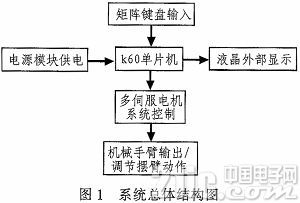
应用于肢体康复设备的多伺服电机控制系统主要由以下几个模块组成:电源模块、矩阵键盘模块、液晶显示模块、主控芯片模块、伺服电机单元以及外部的机械手臂支架。其中,电源模块负责为其余各个模块提供稳定的工作电压;矩阵键盘模块负责外接控制指令的输入;液晶显示模块负责系统运行状态的显示;主控芯片是整个系统的大脑,负责按照程序指令对各个模块进行控制;伺服电机单元受控于单片机,其输出量直接带动机械手臂的运动,使机械手臂完成指定摆臂动作。
系统的总体组成框图如图1。
1.2 单片机主控模块
Kinetis K60是飞思卡尔公司推出的inetis单片机系列中一款基于ARMv7的体系结构ARM Cortex—M4内核的32位单片机。片内资源丰富,包含了GPID模块,EXIT外部中断模块,PIT定时器模块,ADC模块,DAC模块,FTMPWM模块,输入捕捉模块,DMA模块,UART模块以及I2C模块。其中GPIO分为A、B、C、D、E 5个端口,每个端口包含了32位IO口资源。所有的普通IO口都可以设置外部中断,K60包含了4个定时器中断,两个独立的12位DAC模块,两个独立的16位ADC模块。FTM PWM模块共有一个8路PWM和两个2路PWM。
1.3 电源模块
采用美国国家半导体公司生产的集成稳压电路LM2576,它内部含固定频率振荡器(52 kHz)和基准稳压器(1,23 V),并具有完善的保护电路,包括电流限制及热关断电路等,利用该器件只需极少的外围器件便可构成高效稳压电路。LM2576是开关电源,高压差下效率高,发热不严重,输出电流大,可达3 A,但是纹波大,干扰大,电流稍微复杂,需要用到电感,7805是串联稳压电源,效率差,输入输出压差和电流越大,损耗越大,而且,输出电流较小,一般在500mA左右,也有1.5 A的型号,但是纹波小,电路简单,较常用。鉴于我们采用7.2 V电池供电,所以采用输出散热较好的LM2576稳压芯片。
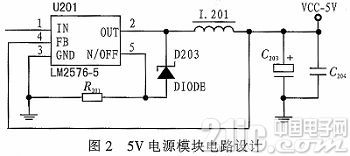
系统的正常工作要有稳定可靠的电源保障。系统中需要的电压值主要有:7 V,6 V,5 V 3种。7 V电压主要为电池接入口处,7 V电压经过两片LM2576芯片分别产生两个5 V、6 V两个不同的电压值。5 V电压主要用于K60单片机供电,液晶显示模块供电,以及为矩阵键盘提供参考电压。6 V电压主要用于为多伺服电机控制系统中的舵机供电。
最终电源电路设计如图2所示。
1.4 伺服电机模块
选用的舵机工作电压6 V左右。电源电压在7.8~7.2 V之间,因此需要稳压片降压。开始选用稳压片LM2576将电压稳定在6 V,静态测试稳定效果很好。在实际调试过程中发现,在电源开启瞬间芯片稳压值会有突变,对于芯片工作以及舵机转角造成影响,使得整体控制效果下降。测试其他几个类型芯片均存在此类问题,最后,决定用二极管降压。由于二极管不存在电流干扰等问题,而且性能较稳定,完全能够满足实际要求。
舵机的控制只需要一路PWM波即可满足要求。PWM波周期10 ms,不同占空比使舵机转过角度不同。
2 多伺服电机控制系统软件设计方案与分析
2.1 系统软件总体设计方案与分析
软件运行需要配置单片机各个模块寄存器数值,使单片机各个模块正常工作。初始化中包括:单片机时钟配置、I/O口配置、PWM模块配置、RTI实时中断配置、脉冲捕捉模块配置。当初始化完毕后,开始检测外部按键的输入,通过判断不同的按键输入,来决定单片机执行摆臂动作或是舵机摆角值的加减调整。通过改变 PWM模块内部寄存器数值可以得到不同占空比的方波信号,实现对舵机的调节。
系统的软件设计流程图如图3所示。
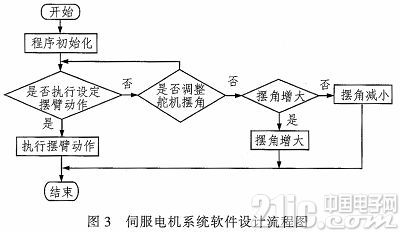
本设计分别为矩阵键盘按键定义五种不同的功能。当按下一号键时,单片机执行内部固有的舵机输出值,多伺服电机控制系统完成固定摆角,带动机械手臂完成指定动作;当按下二号键时,调整一号舵机值的摆角增大;当按下三号键时,调整一号舵机值的摆角减小;当按下四号键时,调整二号舵机值的摆角增大;当按下五号键时,调整二号舵机值的摆角减小。主程序不断扫描哪位按键被按下,依次判断所需执行的语句。
2.2 伺服电机模块软件设计与分析
伺服电机模块的控制主要是通过单片机产生的PWM信号调制。在K60单片机中,脉宽调制模块中有3个独立的PWM模块 FTM0,FTM1,FTM2。其中FTM0有8路独立的可设置占空比的8位PWM通道,每个通道配有专门的计数器。该模块有4个时钟源,能分别控制8路信号。通过配置寄存器可设置PWM的使能与否、每个通道的工作脉冲极性、每个通道输出的对齐方式、时钟源以及使用方式(8个8位通道还是四个16位通道)。另外的FTM1,FTM2模块各有两个PWM通道。这3个模块内部的周期需保持一致,彼此间的周期可设置不同。
3 结束语
文中相关设计是基于伺服电机特性,利用肢体康复设备这个平台得以体现该设计的实际作用,本设计可使肢体康复设备正确安全的做出相应的动作,利用转向伺服电机控制摆臂方向,使肢体康复设备达到应有的性能要求。多伺服电机控制系统是应用于肢体康复设备的主要环节,本系统通过模拟医护人员的肢体恢复辅助动作,能够使机器手臂代替医护人员的一部分工作,减少了医护人员的压力。在目前医护人力资源紧缺的情况下,使用本系统对于患者进行肢体康复训练无疑能节省大量的人力物力财力,同时扩展了Kine ct技术的应用,具备十分广阔且实用的前景。












评论