单片机必须了解的外设功能――GPIO/串行通信

活学活用单片机连载将介绍有效使用单片机外设功能的结构及使用方法,能让我们将能学到各种单片机共通的基本外设功能,并可广泛应用到各个方面。单片机仅靠CPU和内存是无法运行的!本文介绍 GPIO和串行通信。
本文引用地址:https://www.eepw.com.cn/article/201808/386035.htm有效使用单片机不可或缺的“外设功能”是什么呢?
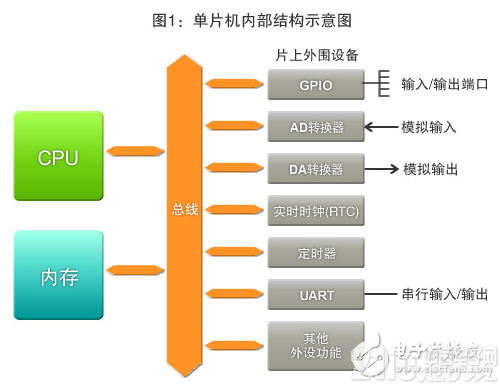
正如过去连载的“单片机入门”系列中所介绍的那样,对电子产品进行控制的单片机是由CPU、内存及外设功能等部分组成的(图1)。CPU根据指令(程序),执行运算、数据的读写以及进行条件判断等,而内存则用来保存该程序(记忆)。
外设功能是指为了使单片机便于使用的各种功能。例如,CPU为了与外部的传感器及开关等进行信号交换,就需要“输入/输出端口(I/O端口)”这种外设功能。
而且,将模拟输入信号转换为数字值的“A/D转换器”以及反过来将数字值转换为模拟输出信号的“D/A转换器”则是单片机对各种信号进行处理时不可或缺的外设功能。
另外,还有为了正确测量时间所用的“定时器”以及提供日期和时计的“实时时钟(RTC)”,用于进行与时间相关的处理,此外还有将并行信号(parallel signal)和串行信号(serial signal)进行互相交换的“UART(Universal Asynchronous Receiver Transmitter,通用异步收发器)”等,以便进行通信。
本连载中,将以瑞萨电子单片机--RX63N为例,介绍令单片机更便于使用的外设功能的基础知识。我们将使用搭载了“RX63N”程序的电子板“GR-SAKURA”进行说明,请你也实际操作试试看吧!
了解数字信号的输入/输出端口---“GPIO”
在“输入/输出端口(I/O端口)”中,数字信号的输入/输出端口即“GPIO(General Purpose Input/Output)”也被称为“通用I/O端口”,是一种用于数字信号输入/输出的非常方便的端口。用于将数字输出的传感器值和开关的ON/OFF值传送到单片机的输入端及通过LED来显示单片机的运算结果,以及输出用于驱动电机运行的信号等等。
GPIO被称为通用端口是其引脚既可以用于输入也可以用于输出。在早期的单片机中,引脚都被固定用于输入或输出,但是现在很多单片机中都可以自由地将其设定为输入或输出端口。假设GPIO端子有8个引脚,则可以将4个引脚用于输入,另4个引脚用于输出,也可以将1个引脚用于输入,剩下的7个引脚用于输出。
在GPIO中,为了使CPU和外部设备之间进行数据交换,要相互执行通过程序处理的数字值(0或1)与信号(电压的LOW电平或HIGH电平)的转换。下面是作为RX63N单片机的GPIO端口基础的寄存器(※1)的作用(图2)。
(※1)寄存器(Register):存在于单片机的CPU和外设功能内部中的记忆回路。用于运算和保持CPU的执行状态。由于是作为CPU及外设功能的内部回路,所以在对内存进行写入和读取时速度很快,但容量却非常小,既有可以用于各种用途的寄存器(通用寄存器),又有用于某些限定的功能和用途的特殊寄存器。
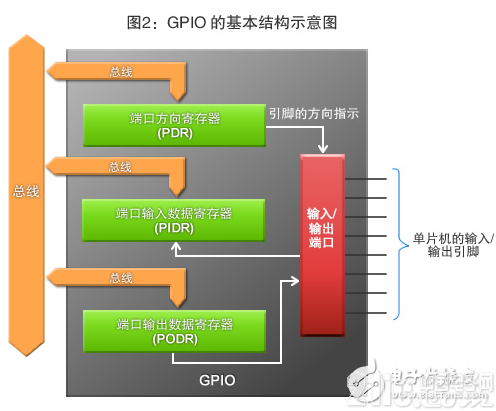
端口方向寄存器(PDR)
决定引脚方向的寄存器,也称为“方向寄存器”。
端口输入数据寄存器(PIDR)
输入时反映所使用的引脚状态的寄存器。从引脚输入LOW电平或者HIGH电平时会将之转换为0或1的值并读取该转换结果。随着引脚的变化数值也将发生变化。所以不会保持读取时的值。
端口输出数据寄存器(PODR)
此寄存器保存用作输出引脚的输出数据。将0或1的值转换为LOW电平或HIGH电平信号并从引脚输出。由于可以与内存一样保持改写前的值,所以在改写前来自引脚的输出电压也将保持不变。
通过GR-SAKURA来体验活用了GPIO的程序!
本期我们将通过“按下开关时LED会发光”这个程序来学习GPIO的运行。我们将利用GR-SAKURA专用的程序库进行编程。(樱花程序库的“数字I/O”)(仅英文版)
在樱花程序库(SAKURA Library)的“数字I/O”中,电路板上的I/O专用引脚究竟是用作输入还是用作输出最初由pinMode(引脚号、模式)函数来指定。一旦指定后,只要引脚的用法没发生变化就无需执行pinMode函数。
用作输入时,通过digitalRead函数来指定引脚号,结果将被作为HIGH电平或LOW电平信号被返送回。用作输出时通过digitalWrite函数来指定引脚号。值还是HIGH电平或LOW电平,HIGH电平相当于1,LOW电平相当于0,所以也可将之记述为0或1。
由于这次使用的是GR-SAKURA电路板上的开关和LED,所以即使不知道与其相连的引脚号和端口号,如为开关,只需在程序中写入“PIN_SW”,如为LED,只需在程序中写入“PIN_LED0”?“PIN_LED3”,樱花程序库(SAKURA Library)就会进行处理。
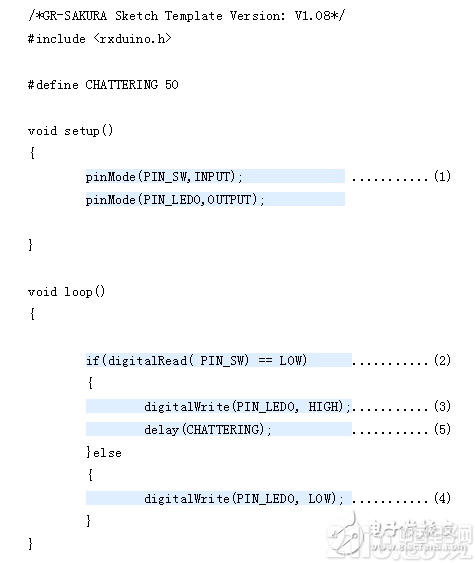
图3所示的是使用GPIO时,通过LED的闪烁来反映开关的值的程序例。首先通过pinMode函数来指定与开关相连的引脚作为输入引脚,将与LED连接的引脚作为输出引脚(①)。只需在开始时定义一次就够了,之后将在setup函数中进行处理。
接下来,“只要按下开关LED就点亮,不按开关LED就熄灭”的部分在loop函数中进行处理。开关是否被按下要根据digitalRead(PIN_SW)返回的值来判断。所以GR-SAKURA的开关在什么都不做(松开)的状态下为HIGH电平(通过上拉电阻连接电源),被按下时为LOW电平(连接GND)。
如果digitalRead(PIN_SW)返回的值为LOW电平时=开关被按下(②)、LED将被点亮。D1的LED为digitalWrite(PIN_LED0, HIGH)时将被点亮(③)。
如果判断为开关没被按下时,当是digitalWrite(PIN_LED0, LOW)时(④),GPIO的输出为LOW电平,LED熄灭。
图3:程序例
请试着使用GR-SAKURA的Web编译器来执行图4所示的程序。Web编译器的使用方法请参考嵌入系统入门系列的“第一次挑战制作!
程序的提示 通过“振荡”来防止误操作
开关是用来接通(开关有时显示为“关”)和切断(开关有时显示为“开”)电路的,即开和关。在开关等装置机械地进行开和关的操作时,任何一种状态都不可能在一瞬间完成。装置会发生非常快速的振动,并非常精细地在开和关之间反复动作后才会转变为新的状态。这种现象被称为“振荡”。为了让大家更容易理解“振荡”的现象,我们制作了一个简单易懂的体验程序(图4)。请大家也试着体验一下吧。
图4:振荡体验程序
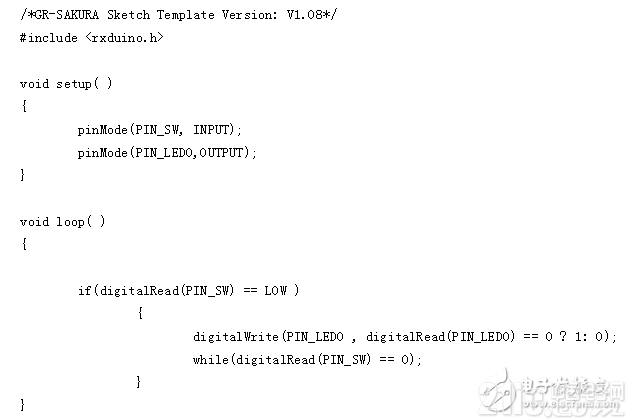
试着通过控制开关反复点亮、熄灭LED来执行所期望的动作,怎么样?是不是有时如你所愿,有时又适得其反?产生这种现象的原因就是因为振荡。如果将振动过程中的状态作为开关的信号读取出来,将得不到正确的结果。因此,需用防振荡程序来解决。
在图3的程序中,检测到开关最初被按下后先停止50微妙(0.05秒)后再进行处理(图3中的⑤)。如果不停止,在检测到开关被按下时虽然LED也会亮灯,但接下来确认开关的状态时,由于振荡的原因,有可能会认为是“开关处于松开的状态”(因为输入暂时还没返回到HIGH)而导致LED熄灭。因此,如上所述,我们通过在开关的状态稳定之前停止处理(50微妙)的方式来解决这个问题。
我们一起学习了GPIO的结构和使用方法。如果将程序中的PIN_LED0的部分换成别的LED号(仅在选0?3时有效),将可以变换闪烁的LED。另外,如果改写判断部分的程序,也可以进行诸如“按两次则LED亮灯,接下来再按1次时熄灭”等复杂的处理。这次的体验程序只使用了GR-SAKURA上的输入/输出设备,但也可将带有数字输出功能的外部传感器连接到GR-SAKURA的I/O端子上,也可以连接LED以外的设备(如电子蜂鸣器)。
串行通信
单片机与外围设备的连接:并行和串行
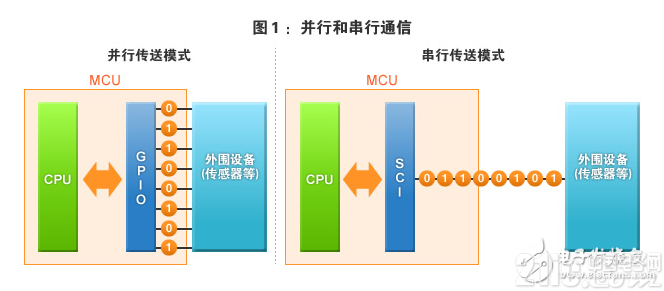
单片机是嵌入式设备的“头脑”,其与作为嵌入式设备的“手和脚”是各种外围设备(输入输出设备等)连接。单片机应该怎样与这些外围设备连接才好呢?比如,我们来考虑一下将传感器与单片机连接的情况。如果使用本连载第1期中介绍的“GPIO”的话,从传感器向单片机传送8位信号时需要使用8个引脚。这种传送模式被称为并行(并行通信)模式(图1D左)。但是,仅一个传感器就需要连接8个引脚,确实太可惜了,是否还有连接更少的引脚就能达到同样目的的方法呢?
此时,可使用串行传送模式(串行通信)。 “串行”的意思就是直列或直线。通过并行传送模式(Parallerl Transferring Mode)中需要8个引脚才能实现的通信,在串行传送模式(Serial Transfer Mode)中,由于可以以排成一直线的模式进行传送,所以仅需一个引脚就够了(图1D右)。由于在单片机内部是通过并行模式来进行信号交换,所以还需将通过串行模式传送来的信号转换为并行模式(串行并行转换)。相反,从单片机向与单片机串行连接的外围设备传送的信号也需要将信号从并行模式转换为串行模式(并行串行转换)。瑞萨电子的单片机RX63N是通过被称为SCI(Serial Communication Interface,串行通信接口)的单元进行这些转换的。例如,使一个引脚对应1位 的char型变量进行信息交换的是并行通信(Parallel communication),而一个引脚以时分(time division)按每1位进行信息交换的就是串行通信(Serial Communication)。
由于串行连接仅使用少数引脚便可进行,所以,近年来多被用于单片机和外围设备之间的连接。GPIO除了用于将驱动电机的信号及LED闪烁等软件操作结果的信号输出时以外,还被用于通过开关或ON/OFF输出的传感器的输入等。
通过UART便可简单地使用串行通信
由于电特性的不同,以及用于进行通信协议的规定不同,串行通信具有多种方式,其中,最易于使用的应该是“异步通信模式”了。仅需用信号线将单片机和外围设备连接起来便可使用,所以在单片机与动作监视器用的终端之间进行通信时、以及单片机与无线LAN用模块进行通信时使用。
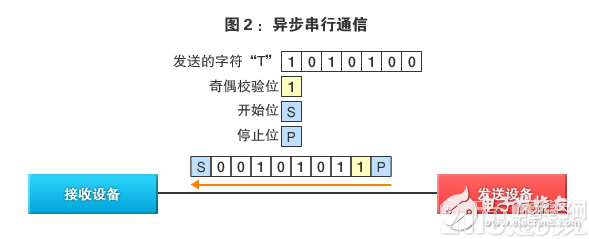
在异步通信模式的串行通信状态下,一字节的文字信息※1在“开始位”(Start bit,意味着开始发送)和“停止位”(Stop bit,意味着停止发送)之间发送(图2)。由此,无需I2C (Inter-Integrated Circuit,内部集成电路)”及“SPI(Serial Peripheral Interface,串行外设接口)”等时钟信号线(但在其他的串行通信模式中这些时钟信号线是必需的,以对发送和接收的时序进行同步)。另外,还可追加用于检查数据是否已正常发送的“奇偶校验位(Parity bit)※2”。
此通信方式所使用的通信用器件被称为UART(Universal Asynchronous Receiver/Transmitter,通用异步收发器),在瑞萨电子的单片机--RX63N中内置了支持此功能的SCI(串行通信接口)。
(※1)异步串行通信状态下,一般都是从“最低有效位(LSB: Least Significant Bit),即最低二进制数位”开始进行发送的。
(※2)奇偶校验位(Parity bit):在发送时按一定量的数据(在SCI中为7位或8位)中所具有“1”(或“0”)的个数为奇数个时定为“1”,为偶数个时定为“0”的奇偶校验位(使偶校验(Even Parity Check)、数据及奇偶校验位中所包括的“1”的数量成为偶数个的方法),并通过与接收侧进行校验,以检测出数据通信中的错误。反之,如果“1”(或“0”)的个数为奇数时定为“0”,为偶数时定为“1”的方法被称为奇校验(Odd Parity Check)。
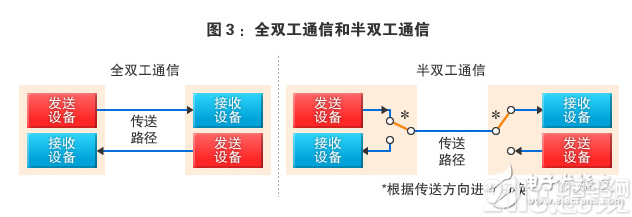
在异步通信中,能实现按“单片机→外围设备”或“外围设备→单片机”的方向确保数据信号专用的信号线时,被称为全双工通信。另一方面,将通过1根信号线来切换通信方向的方式称为半双工通信。全双工方式时需要2根信号线,可同时进行发送和接收。半双工方式时仅需1根信号线,但必须在发送和接收之间进行切换(图3)。
尝试向单片机和电脑之间进行通信!
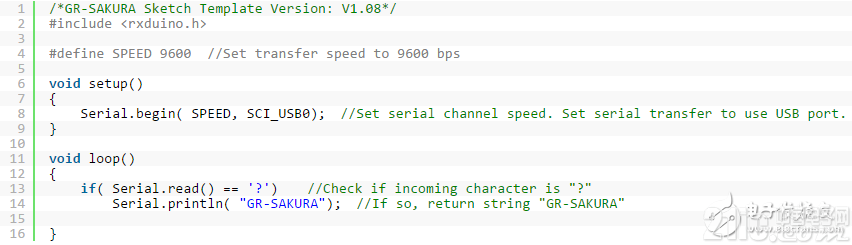
下面,我们通过GR-SAKURA来试用样本程序。本期我们试着通过可在电脑上运行的终端软件和GR-SAKURA之间进行通信。也就是试用从终端软件发送出“?”(半角问号)后就有“GR-SAKURA”的字符串被传送回来的程序(图4)。为了确认该程序的动作状况,需在电脑上安装终端软件。如在Windows系统下可使用免费软件—TeraTerm,而在Mac系统下建议使用该系统标准配备的软件—Terminal。
该样本程序使用了GR-SAKURA的樱花程序库“串行通信(Serial Class)”。该程序库支持全双工异步通信。
在程序的第8行中,对经由USB的通信进行设定。第13行的Serial.read()是用于设定在串行通信中读取从电脑发送过来的数据,在读取“?”(半角问号)时,就将“GR-SAKURA”字符串传送回来。如果换作是GR-SAKURA中所搭载的RX63N单片机来进行处理的话,就是:SCI将电脑传送来的串行信号转换为并行信号,再由CPU对“?”进行识别后判断输出“GR-SAKURA”字符串,之后再通过SCI将并行信号转换为串行信号后发送到电脑上。
虽然只是非常简单的程序,但是由此便可实现在GR-SAKURA和电脑之间进行文字信息的交换。本期我们介绍的是固定字符串,但也可发送GR-SAKURA的处理结果。请大家也作尝试!
SAKURA Sketch Reference: Sakura Library “Serial Communication”(仅英文版)
图4:样本程序:从Terminal输入“?”后,将传送回“GR-SAKURA”的信息。
※//~为注释符,不会影响程序的运行
※本程序仅用于说明程序的原理,并不具有在实际使用时所需的对策。




评论