关于自动驾驶的全面解析
车辆定位
自动驾驶中车辆精确定位的方法主要有3种:
第一种是通过高精度的差分GPS+惯性导航IMU来完成,GPS定位精度高,但是刷新速度较慢,IMU刷新速度快,但是存在累积误差,两者配合使用刚好可以获得快速且精确的位置信息。
第二种是通过激光雷达+高精度地图来定位,将激光雷达扫描周围环境所获得的点云与高精度地图进行比对和匹配,从而获得位置信息。
第三种是通过摄像头图像数据+视觉地图来定位,将摄像头在行驶过程中拍摄到的图像数据,包括图像静态信息和图像间的移动信息,与视觉地图进行比对和匹配,可以获得位置信息。或者从图像中提取一些关键目标及其精确的几何特征(如车道线、地面标记、交通标牌、红绿灯等),将其和高精度地图中存储的信息进行对应和匹配,完成定位功能。
环境理解
包括物体识别和物体追踪,比如行人识别、车辆识别、车道识别、交通标识识别、行驶中车辆的追踪、行动中行人的追踪等。深度学习在这些应用中展现出了比传统计算机视觉技术更好的性能,从而被广泛应用。
行为预测
人类智能在驾驶中体现在可以根据动态变化的环境实时调整驾驶策略,同样机器也需要对车辆周边的人、车、物的行为进行预测,从而做出安全驾驶决策。
行动规划
根据车身状态数据、局部环境数据做出当下最优的行动选择,包括加速、刹车、变换车道、转弯等。
路径规划
从出行需求出发,在高精度地图的基础之上,根据全局路网数据和宏观交通信息,绘制一条从出发点到目标点的最优行车路径。
实事求是地说,国内真正进入到决策层的企业不多,有做园区、机场摆渡车的驭势科技,做高速公路货运的图森互联,还有做园区无人车和干预辅助类高级ADAS系统的智行者。你们听说过的那些单目、双目、环视视觉ADAS公司实现的大多是预警提示类功能,如碰撞预警、盲点监测等,只是停留在感知层面,没有涉及到决策。相比之下国外在决策层探索的企业就很多了,Drive.ai,Comma.ai,nuTonomy,zoox,Faraday,Cruise,Otto,Navya等等。国内的路况确实比国外复杂得多,再加上中国政府还不允许自动驾驶车辆上路路测,这些都制约着国内企业在决策层发力。
识别算法业内有KITTI(用于评测目标检测、目标跟踪、语义分割等)和Cityscapes(用于评测像素级场景分割和实例标注等)等公开数据集进行评测,但是对决策质量和规划能力的好坏还没有统一评价标准,因而无从判断各家技术能力的强弱,只能从公布的Demo中窥测一二。
执行层
自动驾驶的执行层离不开和车载控制系统的深度集成,可惜车厂和Tier1出于自我保护,不愿意对外开放车辆控制总线,一些创企无法对原车做改动,不得已只能另外附加一套电机装置,通过电机拉动钢丝绳,钢丝绳再拉动油门、制动、转向等装置完成执行动作。这种做好确实非常笨拙,操控性和可靠性很差,根本无法体现自动驾驶的优势。真正的自动驾驶必须要将决策控制信息与车辆底层控制系统深度集成,通过线控技术完成执行机构的电控化,达到电子制动、电子驱动和电子转向。
归根结底,自动驾驶的落脚点在“驾驶”不在“自动”,“大脑”再发达也要靠“双脚”来行走。不把人工智能算法落地到车辆的控制执行,你永远不知道有多少dirty work要做。例如车的转向、制动、加速,你究竟要把方向盘打多大何时回轮、刹车踩多大、
归根结底,自动驾驶的落脚点在“驾驶”不在“自动”,“大脑”再发达也要靠“双脚”来行走。不把人工智能算法落地到车辆的控制执行,你永远不知道有多少dirty work要做。例如车的转向、制动、加速,你究竟要把方向盘打多大何时回轮、刹车踩多大、驱动给多少,人类司机是凭经验来执行的,但是对自动驾驶系统来说,需要很多汽车动力学的knowhow才能完成。如果你只是单纯地在计算机上跑几个Demo,没有实打实地上车路测过,哪家车厂敢用你的算法?真上路还不得撞得人仰马翻?那些单靠几个博士弄个算法跑个测试集刷刷榜就想出来融资的初创都是耍流氓。业内人打趣说,做自动驾驶只要撞死个人,公司就可以直接倒闭了,融的那点钱还不够赔偿费呢!大家所熟知的国内计算机视觉领域四大独角兽,都未染指自动驾驶(商汤只是声称可以提供算法支持,和真正做自动驾驶还差得远呢),视觉算法在人脸识别、安防监控领域落地相对比较容易,但是在自动驾驶领域要实实在在做车的话还是有很多坑的,这就是为什么国内涉及决策层和控制层的企业这么少的原因。
中国人要想碰执行层确实非常难,国内在线控技术上仍处在研发初始阶段,技术底子薄,积累时间不足。国外车厂和Tier1垄断了自动驾驶控制执行部分,同时它们在感知和决策部分也在不遗余力地投入研发,凭借多年积累的工程能力、产品化能力和汽车经验,已有符合车规的产品成熟量产,对国内企业来说确实是不小的压力。创业企业可以通过和国产车厂、国产供应商合作研发,共同抵制国外厂商,也可以和深谙执行器改装的团队合作,介入执行层,总之未来的竞争不会是单个企业实力的比拼,而是生态联盟间的合纵连横。
自动驾驶的基本技术架构
关于自动驾驶的全面解析
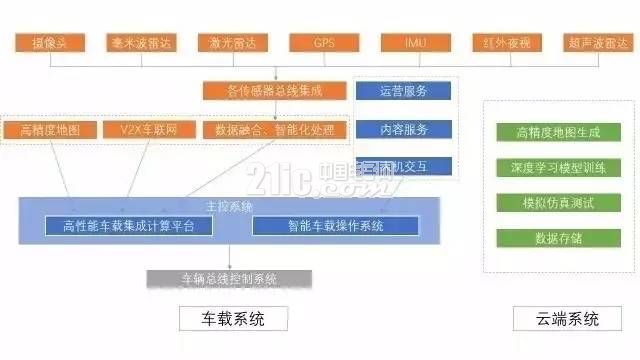
上图是我画的自动驾驶基本技术架构,由车载系统+云端系统组成。
车载部分
感知层各种类型的传感器采集、接收的数据,通过总线进行集成,再通过数据的融合和智能化处理,输出自动驾驶所需的环境感知信息。车载传感器的优化配置,可以在保证精度和安全性的基础上,降低整体成本。
主控系统由硬件部分高性能车载集成计算平台和软件部分智能车载操作系统组成。计算平台融合了传感器、高精度地图、V2X的感知信息进行认知和决策计算,硬件处理器可以有GPU、FPGA、ASIC等多种选择,它们各自的优缺点可以参见小研以前的分析文章《AI时代,我的中国“芯”》。智能车载操作系统融合了车内人机交互、运营服务商、内容服务商的数据,为乘客提供个性化服务,真正把智能车变成下一个“互联网入口”,目前的主流操作系统包括Android、Linux、Windows、QNX、YunOS(阿里云提供)等。




评论