基于四旋翼飞行器的长导线源时域地空探测系统的研究与实现

作者 王明全 王远航 于志新 陶健 东北大学 计算机科学与工程学院(辽宁 沈阳 110819)
本文引用地址:https://www.eepw.com.cn/article/201707/362273.htm王明全(1973-),博士,讲师,研究方向:信号与信息处理。
摘要:本文介绍了一种以四旋翼飞行器为载体的时域地空电磁探测系统。该系统采用Cortex-M3内核处理器,以全差分模拟前端压制电磁干扰,实现了24位低噪声、多通道电磁数据同步采样及存储,实现了一套由四旋翼飞行器搭载的时域电磁接收系统,并通过WiFi Mesh网络来进行地面远程监控。该系统具有高效、低成本、勘探深度大和空间分辨率高等优点,为地质勘探提供了一种可靠的新方法。
引言
地质勘探对于矿产资源的开采具有重要的指导意义,随着时代的发展,探测方法也在不断改进[1]。早期的地面时域电磁法虽然技术发展的比较成熟,但探测效率低下,且很难对特殊地形进行勘探[2]。后来提出的航空时域电磁法虽然解决了地面时域电磁法的问题,但是成本较高,探测精度也不理想。而新兴的地空时域电磁法则很好地融合了前面两者的优点[2],因此近些年被广泛研究。而另一方面,近些年国内四旋翼飞行器技术发展迅猛,应用也越来越广泛。针对以上背景,在参考众多文献[3-14]后,着手设计并实现了一套以四旋翼飞行器为载体的时域地空电磁探测系统。该系统以四旋翼飞行器作为载体,采用了全差分模拟前端进行电磁压制,并通过WiFi Mesh网络来进行地面远程监控,实现了24位低噪声、多通道电磁数据同步采样及存储。使得该系统高效、低成本、勘探深度大且空间分辨率高。
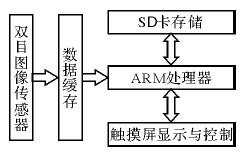
1 系统整体方案

系统整体结构如图1所示。本系统由长导线发射源、接收电路、空中数据采集、远程监控、数据传输、ICA降噪、地面数据接收及处理几部分构成。经过波形发生与功放电路,产生一个激励信号,送入发射用长导线,长导线长80m,发射电流5A。然后由位于四旋翼上的接收电路进行电磁信号接收,并用机载单片机进行数据采集与储存,最后通过远程数据传输网络将数据传给位于地面的数据处理系统进行数据处理。
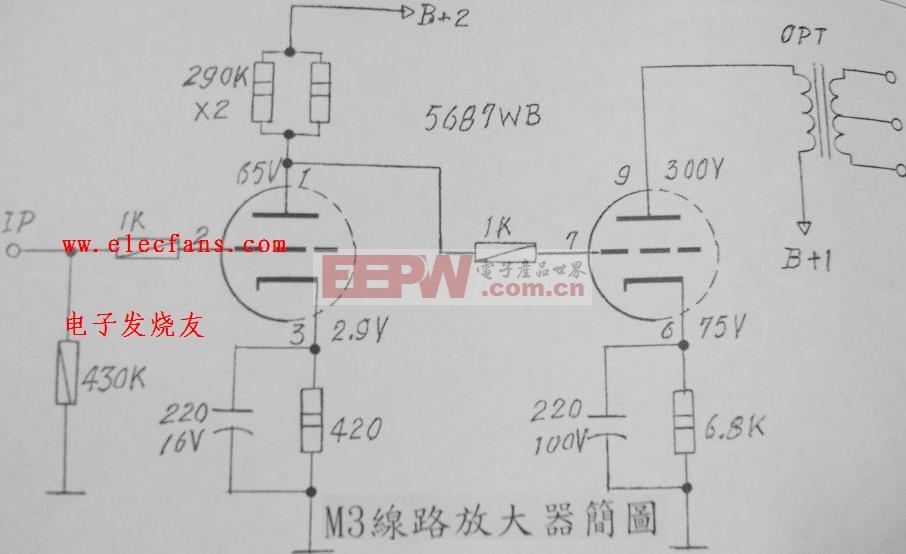
2 发射电路
波形发生电路:采用9833模块产生一个频率为18kHz的正弦波。
功率放大电路:通过9833模块得到了较为理想的信号波形,但此时的信号输出能力较弱,需要进行功率放大,以保证足够的输出电流,从而确保产生足够强大的磁场。具体方案如图2所示。

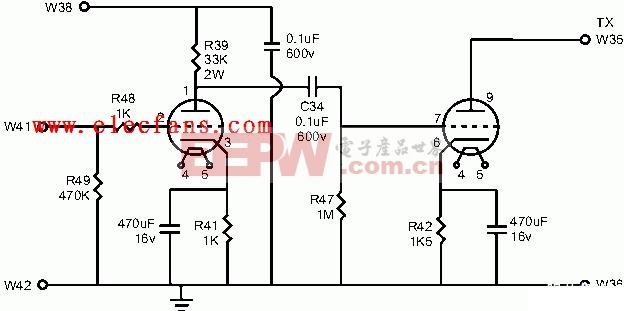
3 接收电路及信号预处理
从接收线圈接收到的信号非常微弱且含有大量噪声,需要进行滤波以及放大等预处理。预处理方案如图3~图5所示。采用全差分运放驱动模数转换器具有共模抑制性能出色、二阶失真产物较少、直流调整算法简单的优点,可有效应对飞行器飞行过程中产生的共模干扰。

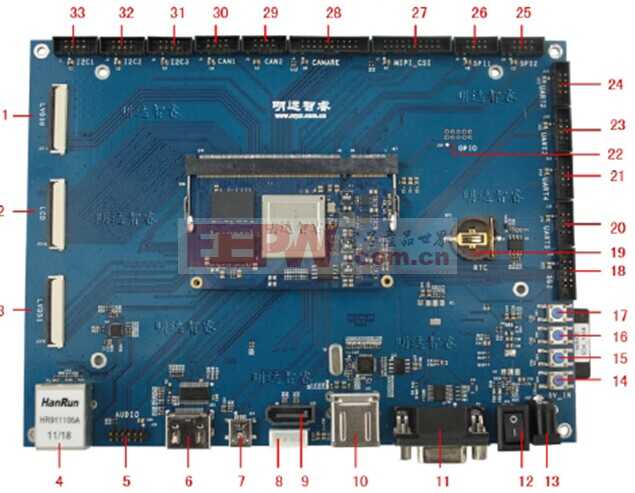
4 数据采集部分
采用三分量全差分连续采集存储技术[6],在地空电磁接收机中,为提高波形数据的传输效率,首先使用 GPIO口的位操作方式优化控制时序,减少时序中无数据传输的时间,再利用DMA数据传输通道,从而缩短整体数据的传输时间。时间域电磁信号早期衰减迅速且幅值大,晚期信号微弱。采用24位△∑结构的模数转换器ADSl274对信号进行数字采样,以确保不小于140 dB的动态范围,工作方式设置为三通道全差分输入,由统一时钟进行同步采样,实现三分量电磁信号采集。数据采集及飞控部分如图6所示。

5 系统供电电路
采用聚合物电池进行供电,用专门的电压转换芯片对电池电压进行转换从而满足数模转换器、模拟电路、处理器等模块的供电要求。方案如图7所示。
6 远程监控及数据传输
在四旋翼飞行器的飞行过程中,需要操作人员在地面对空中接收机进行远程监控,根据实时传回的数据监控接收机的状态和对采集过程进行控制,地空电磁接收系统采用基于802.119协议的WiFi网络建立远程数据传输通道。802.119工作在2.4GHz频段,与四旋翼飞行器的飞控和视频传输系统不会发生串扰而威胁飞行安全。其最高传输速率达 54 Mbit/s,在开阔场地使用高增益天线时,其有效距离可达400m。为实现地面站和巡航的四旋翼飞行器进行无缝链接,采用了基于多跳结构的 WiFi-Mesh网。扩展无线Mesh网的覆盖范围只需添加节点设备,网络便可进行自我配置,并确定最佳的多跳传输路径。

7 地面数据处理系统
经过电性源地-空电磁探测系统硬件滤波和信号检测之后,得到时域电磁信号的信噪比仍然较低,需要进一步进行软件数据处理,包括电磁信号的基线校正,双极性叠加,取样滤波等[14],以此最大程度地提高信噪比。并通过求解相应的地电参数来识别地下电性结构。流程图如图8所示。
8 结论
本文利用STM32处理器以四旋翼飞行器为载体,设计了一套时域地空电磁探测系统,并可以实现对地下矿藏的探测。这得益于此处理器强大的运算和处理能力。四旋翼飞行器是本设计的一个亮点。四旋翼飞行器价格相对较低,易于操作,且技术成熟,能够很好的满足系统要求。但由于场地限制,以及飞行器操作水准有限,效果难免不够理想。若发射功率更大,飞行器操作水准更高,则探测能力还可大幅提升。
参考文献:
[1]Fountain D 60 years of airborne Em-focus on the last decade 2008
[2]朱凯光,林君,刘长胜.频率域航空电磁法一维正演与探测深度[J].地球物理学进展,2008(06).
[3] M Tohru, T Yoshikazu; K Kusunoki.Development of grounded electrical source airborne transient EM (GREATEM) 1998:1-2.
[4]T Mogi, K Kusunoki, H Kaieda.Grounded electricalsource airborne transient electromagnetic (GREATEM) survey of MountBandai,north-eastern Japan[外文期刊] 2009(01)
[5]H Ito, T Mogi, A Jomori.Further investigations of underground resistivity structures in coastal areas usinggrounded-source airborne electromagnetics,2011(08).
[6]嵇艳鞠,林君,许洋铖.大定源时间域吊舱式半航空电磁勘探理论研究[R],2009.
[7]Y J Ji,G H Yang,S S Guan.Interpretation research on electrical source of time domain ground-airborneelectromagnetic data,2011(06).
[8]M S Munkholm.Motion induced noise from vibration of a moving TEM detector coil:Characterization and suppression,1997(01).
[9]B R Spies.Local noise prediction filtering for central induction transient electromagnetic sounding,1988(08).
[10] D Lemire.Baseline asymmetry,Tau projection,B-field estimation and automatic half-cycle rejection,2001.
[11] A C Davis,J Macnae,T Robb.Pendulum motion in airborne HEM systems[J].2006(04).
[12]嵇艳鞠,李肃义,于生宝.基于异常线圈的时间域AEM系统测试和标定方法研究[J],地球物理学报 2011(10)
[13]许洋铖,林君,李肃义.全波形时间域航空电磁响应三维有限差分数值计算[J],地球物理学报,2012(06).
[14]王忠,黄跃,林君.高速、大动态范围瞬变电磁接收机的研制[J].仪器仪表学报,2006(04).
本文来源于《电子产品世界》2017年第8期第43页,欢迎您写论文时引用,并注明出处。





评论