- 针对在参数变化、外部干扰条件下四旋翼飞行器的稳定飞行控制问题,本文提出了一种基于反步法的四旋翼飞行器增稳控制方法。首先,建立四旋翼飞行器的动态模型。其次,基于反步法设计的控制器用于飞行器姿态控制,采用模糊自适应PID控制器对飞行器的高度和位置进行控制,将两者结合构成一个内环姿态和外环位置结构的双闭环控制器,从而实现四旋翼飞行器的混合增稳控制。仿真和实际测试结果表明所设计的控制器能够实现参数变化和外部干扰时的稳定控制。
- 关键字:
反步法 模糊自适应PID 飞行控制 四旋翼飞行器 稳定性 201809

- 介绍了一种基于四旋翼飞行器快速、稳定探测和跟综地面上有色信标的系统。该系统由三部分组成:具有探测和跟踪功能的四旋翼飞行器、可遥控移动的有色信标小车和遥控终端(地面站)。四旋翼飞行器、可遥控移动的有色信标小车和遥控终端均采用Cortex-M3内核处理器。四旋翼飞行器能准确探测到地面上的有色信标位置,并在信标静止的情况下能快速稳定悬停在信标的正上方。在遥控终端控制有色信标小车任意方向移动,四旋翼飞行器能快速跟踪信标的移动。当四旋翼飞行器在有色信标小车上方一定距离和范围内时,四旋翼飞行器和小车同时发出声光报警。
- 关键字:
四旋翼飞行器 探测和跟踪 颜色识别 PID控制 201808
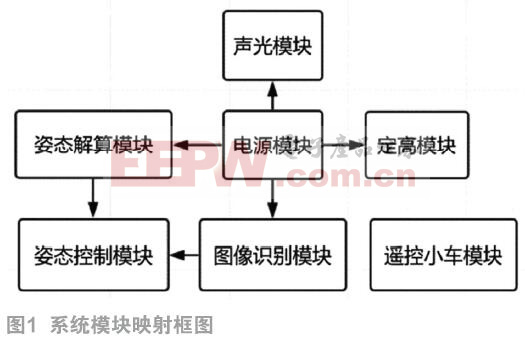
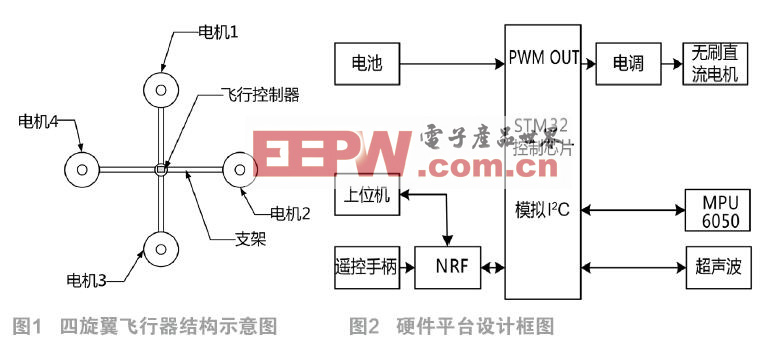
- 随着四旋翼飞行器技术的不断应用,无人机的各种用途被不断发掘出来。基于四旋翼飞行器相对平稳的飞行状态和可控等特点,利用四旋翼飞行器进行探测和跟踪目标成为可能。本文介绍了一种四旋翼自主飞行探测跟踪系统,该系统采用以STM32F4单片机作为姿态控制模块的主控芯片,采用MPU9150、MS5611作为姿态解算模块的传感器,利用US-100传感器和气压计实现融合定高,图像处理上采用OV7670摄像头,配合RX23T-NUEDC开发板采集环境信息,以实现定高悬停以及定点跟踪等功能。
- 关键字:
四旋翼飞行器 定高悬停 定点跟踪 201807
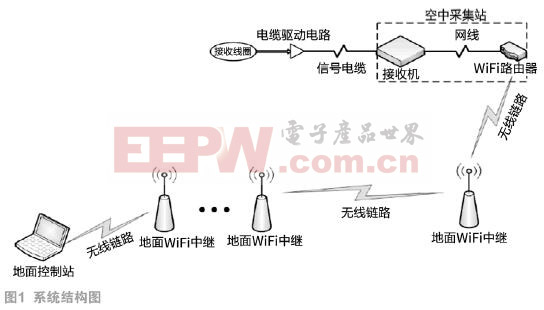
- 本文介绍了一种以四旋翼飞行器为载体的时域地空电磁探测系统。该系统采用Cortex-M3内核处理器,以全差分模拟前端压制电磁干扰,实现了24位低噪声、多通道电磁数据同步采样及存储,实现了一套由四旋翼飞行器搭载的时域电磁接收系统,并通过WiFi Mesh网络来进行地面远程监控。该系统具有高效、低成本、勘探深度大和空间分辨率高等优点,为地质勘探提供了一种可靠的新方法。
- 关键字:
四旋翼飞行器 时域地空电磁探测系统 Cortex-M3 201708
- 煤矿事故的应急救援根据事故灾害的类型、事故可能引起的破坏程度和事故地点的实际环境采取相应救援方案和救援装备,达到真正的应急救援效果。目前,已经研制成功的救援机器人主要有多履带式机器人、腿轮式机器人、蛇
- 关键字:
四旋翼飞行器 应急救援 通信节点 无线通信
- 本文基于四旋翼飞行器的工作原理和性能特点,给出了飞行器控制系统设计方案,进行了姿态和高度数据采集的软件设计,并基于卡尔曼滤波算法完成了传感器数据融合,设计了PID控制器并完成了软件实现。实验结果表明,该控制系统能够稳定可靠运行,具有较强的鲁棒性。
- 关键字:
四旋翼飞行器 卡尔曼滤波 PID 鲁棒性 201610
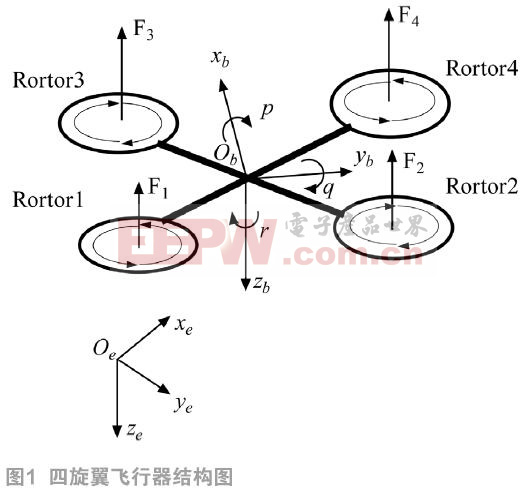
- 引言
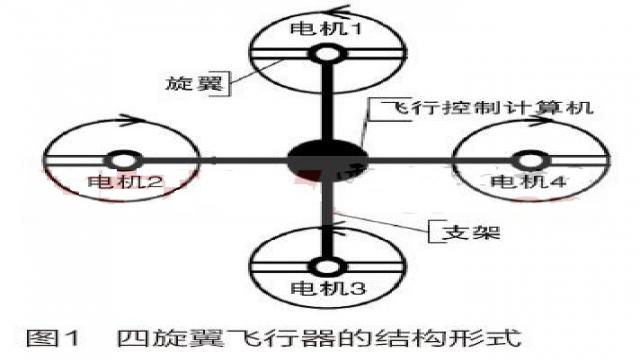
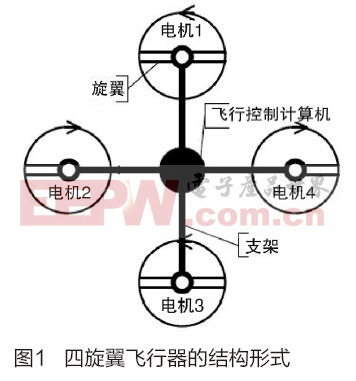
四旋翼飞行器是一种具有6个自由度和4个控制输入的可垂直起降、悬停、前飞、侧飞和倒飞的无人驾驶飞行器,4只旋翼可相互抵消反扭力矩,不需要专门的反扭矩桨。被广泛应用于无人侦察、森林防火、灾情监测、城市巡逻等领域。飞行控制系统是四旋翼飞行器的核心部分,其性能的好坏决定了整个系统的性能。近年来,微小型四旋翼无人机的自主飞行控制得到了研究人员的广泛关注[1]。随着计算机技术和电子技术的发展,国内的小型飞行器研究开发工作逐渐升温,许多公司形成了产业。例如大疆公司将四轴飞行器等多轴飞行器实现了商业化应用
- 关键字:
四旋翼飞行器

- [摘要]如今的四旋翼飞行器可以是居民楼前的送货员,是靓丽风景的空中摄影师,是救灾抢险的一线人员。明天它也可能会成为侦探界的福尔摩斯,还没准是间谍界中的汤姆•克鲁斯。
四旋翼飞行器“精灵”
出品:科普中国
制作:北航飞天科普创意团队
监制:中国科学院计算机网络信息中心
一个21世纪的“精灵”
四旋翼飞行器是《时代》杂志2014年度评选的十大科技产品之一,是汪峰“头条&rd
- 关键字:
四旋翼飞行器
- 本文基于四旋翼飞行器的工作原理和性能特点,设计了飞行器控制系统的硬件电路。系统包含微控制器模块、姿态测量模块、无线通讯模块、遥控器模块、电机驱动模块。系统能够为传感器参数测量、控制算法实现、无线通信等提供硬件平台,功耗低、可靠性高。实验结果表明,本系统能够稳定、可靠运行。
- 关键字:
四旋翼飞行器 STM32 无线通信 电机驱动 201512
四旋翼飞行器介绍
您好,目前还没有人创建词条四旋翼飞行器!
欢迎您创建该词条,阐述对四旋翼飞行器的理解,并与今后在此搜索四旋翼飞行器的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473