基于AVR单片机的节能机器人电梯,软硬件协同

一、项目概述
1.1 引言
随着社会的发展,高层建筑和智能化建筑的不断出现,作为垂直运输工具的电梯得到了越来越广泛的应用,人们对电梯服务质量及可靠运行提出了越来越高的要求。在2010年4月22日电梯行业“节能·安全·智能”技术交流会上中国电梯协会副秘书长张乐祥提出节能、安全、智能已成为电梯技术发张的主流,驱动与控制系统仍存在改善空间,远程监控维修技术成为焦点。
本文在节能方面运用电梯群控分配控制技术,以能量消耗作为主要指标把侯梯和乘梯时间作为模型约束建立数学模型,另外如果持续3 分钟没有轿厢、层站召唤,电梯将自动关闭照明及风扇,并降低梯厅位置显示器的亮度,从而大幅度减少待机电力消耗;在安全和智能方面通过对电梯的各种状态进行实时监控,同时对电梯运行过程中可能出现的各种故障进行预测、诊断和报警。
因此,此项目开发是基于 AVR处理器的智能电梯控制器,并融合CAN总线技术、多媒体技术、智能控制技术、优化调度技术、故障预测与诊断等技术。在硬件上,选用32位AVR处理器作为电梯控制器的核心CPU,在软件上,选用Linux操作系统作为电梯核心控制器的软件平台。
1.2 项目背景/选题动机
随我国城市化建设的迅猛发展和物质文化生活质量迅速提高,建筑业日益发展壮大。为建筑物内提供上下交通运输的电梯工业也迅速发展起来。电梯不仅是生产运输的主要设备,更是人们生活和工作中必备的交通工具。和汽车一样、已成为人们频繁使用的交通运输设备。
近年来,我国每年新增电梯均在15%以上,因此我国的电梯节能有许多潜力可挖。我国的电梯生产量、需求量已经占到全球50%以上,而电梯节能技术的研究基础比较薄弱。电梯要实现整体节能,与楼宇的电梯配置方案也密切相关。目前我国有许多楼宇都存在电梯的无效耗能。例如,一栋楼配置了多台电梯但却没有采用普通的并联、群控技术或目的选层群控技术,导致多台电梯向同方向运行的无效耗能。因此为了提高高层建筑中多部电梯的运行效率和服务质量,需要用电梯群控管理系统来进行合理的调度和管理。
然而近些年电梯安全事故时有发生,整个行业不得不深入分析。就电梯事故的原因,我们需要对电梯故障及时检测,就能有效地预防电梯事故的发生,减少对人们造成的危害。
为了实现上述功能,我们融入了“节能环保”的理念,设计了“基于AVR单片机的节能机器人电梯”。
二、需求分析
2.1 功能要求
(1)当电梯3分钟没有接收呼梯信号时,电梯自动关闭照明及风扇。
(2)当电梯运行速度超过一定值时,发送报警信号到远程控制系统
(3)当电梯断电时,发送断电信号到远程控制系统
(4)当轿厢内报警按钮按下时发送信号至远程控制系统,远程控制系统接收到信息后由远程控制系统端的工作人员发送信号到轿厢点亮报警指示灯。
(5)当电梯的重量超过一定值时,电梯停止启动,并发出报警声音
(6)电梯轿厢外显示屏上能够显示电梯目前所在层数、所呼叫电梯等待时间
(7)电梯轿厢内显示屏上能够显示电梯当前运行方向(电梯向上运行时,向上运行指示灯点亮;电梯向下运行时,向下运行指示灯点亮)、当前所在层数、电梯到达目的层的的时间
(8)当多个呼梯信号同时发出时,电梯能够通过群控器进行最优配置,并且有轿厢外显示屏显示所分配电梯
2.2 性能要求
1)现场数据采集器连续采集现场数据,并有效传输
2)群控--模糊神经网络算法模型,能耗率低
3) 设备具有数据通信、电源管理和设备监控的功能
4)设备具有视窗化人机界面和综合监控应用软件
5)系统工作稳定且兼容性强,核心控制和远程控制联动便利,易维护
三、方案设计
3.1 系统功能实现原理
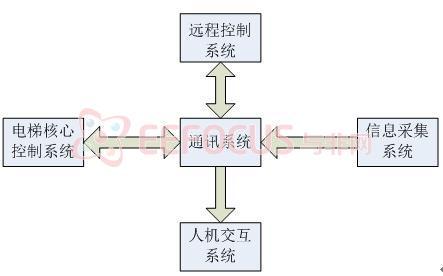
系统架构图
(一)信息采集系统
该系统主要用于采集电梯的运行状态、电梯故障信息、楼层号、呼梯信号、开关门信号以完成电梯基本控制功能,并将这些信息通过CAN总线发送到决策系统(监视工作站、群控器)进行处理及时作出响应。
关于信息采集各模块的信息如下表所示:
信息采集模块 | 应检测的信息 | 实现方法 | 备注 |
运行状态信息 | 速度 | 结合其他检测到的信息来判断 | 电梯的运行状态主要包括:正常运行、故障、休眠状态(长时间没有呼梯信号时电梯处于休眠状态) |
故障信息 | 速度异常、停电、关人 | 检测速度是否异常:光电传感器;检测是否停电:电流传感器;检测是否关人:故障按钮 | 通过采集速度、电流等来分析冲顶、蹲底、停电、关人等常见的电梯故障 |
电梯的位置信息 | 电梯所在的楼层号 | 光电编码器 | 用于检测发生故障时电梯所在的位置 |
呼梯信号 | 电梯的厅层召唤信号、轿内召唤信号 | 召唤按钮 | ------------------------------------------------------- |
开关门信号 | 开门、关门 | 开关门按钮 | ---------------------------------------------------- |
承载量信息 | 重量 | 压力传感器 | 检测电梯是否超重 |
(二)通讯系统
由于采用了AVR32单片机作为核心控制器,其开发板上已有两个CAN接口,因此通过使用CAN总线控制器比较方便。
CAN现场总线技术通过利用现场传感器用于采集现场电梯各种信号,并通过CAN通讯卡与决策系统相连。电梯核心控制系统可以通过CAN网络和各个数据采集节点通讯,实现各种数据参数的采集及数据的初步分析,并与远程控制系统通过Internet技术进行数据传输:通过计算机数据处理中心对现场采集的数据进行深层次的综合分析,另外计算机数据处理中心也可以通过Internet网络对电梯运行状态进行远程监测。
运用Internet技术和分布在各地的电梯所在的局域网把每台电梯连接起来,也就是让电梯上网,通过Intertnet实时传送电梯的工作状态和工作参数。可以变被动保养为主动保养,使用户的故障停梯时间大大缩减。同时电梯远程监控系统的故障信息记录数据库能够方便地使维保中心建立起一套电梯运行、故障及维修档案库,被保养电梯何时出现故障、维修人员何时到现场、电梯如何恢复正常等数据都会记录在数据库中。可以对某台电梯,某组群控电梯,或某一特定时间段的电梯故障及维修情况进行统计。维保中心的操作人员可以通过监控软件定期对数据库进行数据整理、统计和报表打印等工作。
系统硬件以高性能的嵌入式微处理器AVR32 AT32UC3A,其中的Internet控制器和DSP模块为核心来设计通信系统中的以太网模块,并在AVR32单片机中的DSP模块用软件实现TCP/PI协议栈,使AVR32芯片具备上网功能,从而可以用监控系统服务器通过AVR32单片机与远程终端进行大量数据交换。DSP主要完成数据的解包和封装。当有数据从Internet控制器传输过来时,DSP对数据包进行分析,如果是ARP数据包,程序转入ARP处理程序。如果是PI数据包,通过判断PI数据包的类型,转入相应的CIMP处理程序和TCP处理程序,数据解包后,将需要的数据保存。当DSP发送数据时,则将数据进行层层封装,发送到AVR Internet模块缓冲区,Internet控制器将数据封装成以太网数据帧后通过以太网接口输出到局域网中。
通讯系统结构框图如下:
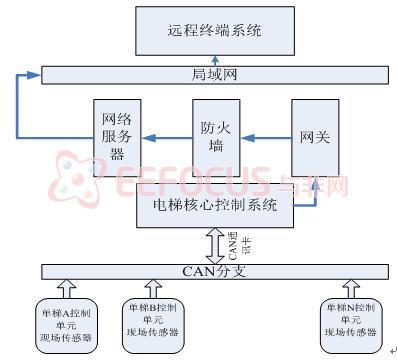
通讯系统结构框图
(三)电梯核心控制系统
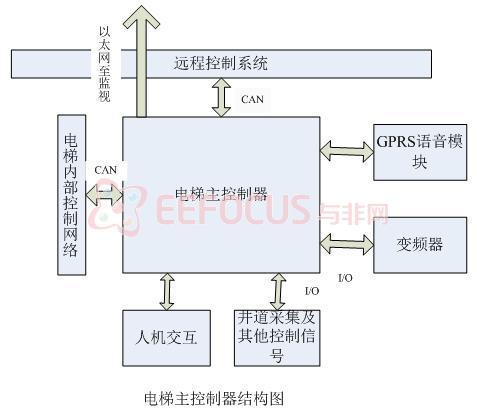
电梯核心控制系统负责将采集到的电梯各部分数据(包括电梯运行数据、状态信息等)进行处理以完成电梯基本控制功能,同时将处理后的相关信息经通讯模块传输给远程控制系统和人机交互系统。当电梯发生故障时,将电梯信息通过各个电梯的主控制器的故障诊断算法进行现场的电梯故障诊断,并将诊断后的故障信息送给远程监视系统。当电梯接收到呼梯信号时,将呼梯信息发送给群控制器,经群控制器分析处理后发送分梯信号进行电梯调度。对于基本控制功能,电梯核心控制系统通过CAN总线方式从电梯内部控制网络上挂接的外呼、操纵盘和门机单元采集呼梯、开关门按钮和门状态信息,并实时点亮应响应的呼梯灯,以实现对呼梯系统的控制。核心控制器还通过脉冲接收装置接收光电编码器传输过来的脉冲信息,以实现对电梯的定位。
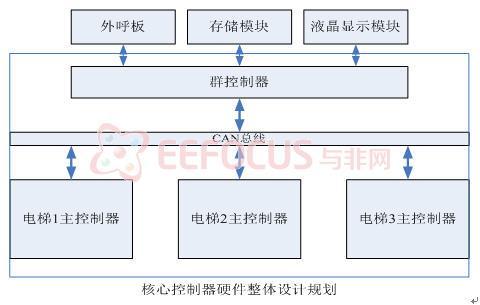
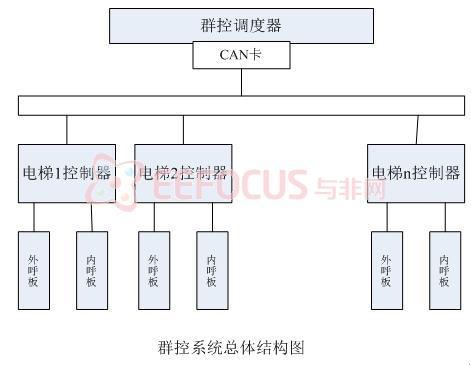
在智能方面,电梯核心控制系统可实现监视、群控、GPRS报警等功能。其中,以三台电梯为例,核心控制系统分为一个群控制器和三个电梯主控制器,这四个控制器均由AVR单片机构成,其中三个电梯主控制器与群控器、监视工作站的通信方式有两种,一种是三者位于同一个网络中,我们通过另一条CAN总线(异于电梯内部的CAN控制网络)将群控制器和主控制器挂接在一起;另一种是群控和监视信息分别在不同的网络中传输,其中核心控制器与群控器通过CAN总线方式实现通信,而监视信息可通过以太网方式由电梯主控制器传输给远程监控系统。为兼容这两种方式,控制器在设计时将同时考虑CAN通信和以太网通信两种方式。
群控制器除了与三台电梯主控制器通过CAN总线通信,还连接了外呼板模块、存储模块、液晶显示模块。存储模块存储大量数据处理信息。外呼板模块将呼梯信号传送给群控制器,群控制器经过模糊神经网络算法得出最节能的电梯行驶路径,并将算出结果反馈给液晶显示模块,达到人机交互的作用。
GPRS功能可用于向远程维修服务器或远程维修人员以无线方式发送报警信号及相关的故障信息。为方便电梯的管理与配置。我们可以通过LED段码管显示电梯当前位置,通过键盘输入对电梯的参数进行配置,通过具有中文显示功能的LCD显示屏建立电梯的配置界面,并可用于故障信息的实时显示。
电梯主控制器结构图如下:
群控系统总体结构图如下:
(四)远程控制系统
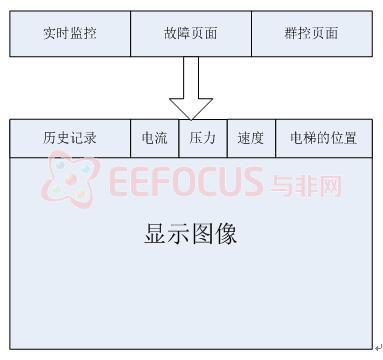
该系统主要用于远程监控,专业人员根据页面上显示的相关信息及时处理。
电梯正常情况下处于群控状态和休眠状态,一旦发生故障,便会自动报警,并主动转到故障页面,显示故障原因、电梯所在的位置,工作人员及时联系维修人员及其医护人员。
页面显示图如下:
(五)人机交互系统
每个单梯系统安装一个24层的电梯操纵盘。操纵盘放置在轿厢内门的右侧,轿厢内无辅助操纵盘。操纵盘上的主要功能如下:
1)1-24层指令按钮及指示灯
2)开关门、门保持按钮
3)电梯运行状态显示(楼层以及据目的楼层的时间显示)
4)报警按钮及指示灯
报警按钮是乘客被困在轿厢内时用来呼救和与外界联系的工具,轿厢先将报警信号传递给电梯核心控制系统,此信号经过电梯核心控制系统的故障检测模块处理后再经由通信系统传至远程控制系统。远程控制系统接收到信号后再发送新信号到轿厢内去点亮指示灯告诉被困人员,工作人员已获知被困消息来安抚被困人员。
3. 2 硬件平台选用及资源配置
(一)硬件平台选用
EVK1105是一个基于AVR32 AT32UC3A单片机控制器的评估套件和开发系统。它配备一系列丰富的外设、内存,并且可充分开发AVR32设备的全部潜能。其开发板图如下所示:

• 支持AT32UC3A
• 以太网端口
• 传感器:光照、温度、电位器
• 4x20蓝色LCD(PWM变频背光)
• JTAG连接器、Nexus、USART、USB 2.0接口,TWI接口、SPI。
• SD和MMC读卡器
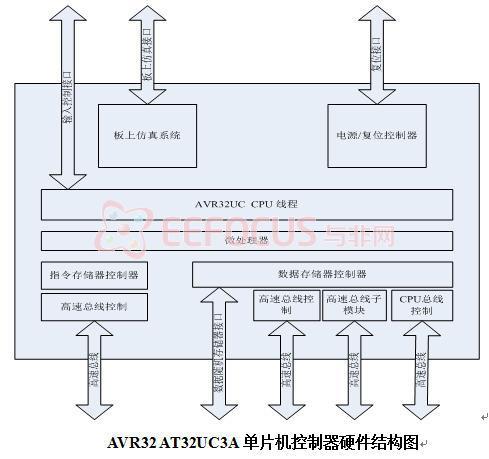
AVR32 AT32UC3A单片机控制器硬件结构图
(二)AVR Studio 5 开发软件
·智能编译器
·400个演示工程
·支持8位或32位AVR
·便捷的用户手册和用户指南
3.3系统软件架构
(1)电梯控制软件总体结构
一、内核层:操作系统内核和库提供了各种机制,这些机制包括了内存的管理、线程调度、线程同步等,这些机制是电梯核心控制器嵌入式软件的核心,所有的任务都在这些机制的统一管理下有序地实现各自的功能。
二、接口层(驱动程序):驱动程序属于操作系统的一部分,包括了各模块中所有设备的驱动,例如:以太网驱动、SPI驱动、CAN节点的驱动,GPIO的驱动、计数器的驱动、人机交互模块中段码管、键盘和LCD的驱动。它们负责直接与硬件打交道,实现CPU与各设备的数据交互。
三、应用层:这部分处于整个结构的顶层,由用户直接根据所要实现的具体功能编写实现,每个任务由一个线程来实现。应用程序的开发可分为三个模块:
(1)数据块模块:存放历史数据
(2)通信模块:分为以太网模块、CAN通信模块、SPI通信模块。以太网模块采用TCP / IP协议,通过Sock2et通信与参数设定板按照自定义的数据格式进行通信,完成电梯参数的设定(包括电梯的时间参数、距离参数、功能性参数等一百多个参数的设定);CAN通信模块,完成与内、外召板直接的通信,主要用来传输楼层信息、楼层字符的显示、开关门到位等一系列的控制信息;SP I通信模块主要用来作为与辅助MCU的通信,该通信包括:编码器的值、电梯的状态信息、时钟数据
(3)控制模块:控制模块是整个系统的核心,该模块包括电梯的三大模式:正常模式、故障模式、群控模式。正常模式包括电梯单梯运行时的相关程序和跑层算法;故障模式包括电梯在出现故障时做出反应,确保电梯安全运行;群控模式包括多梯运行时使得耗能最少,达到节能环保的目的。
软件架构图如下:

软件架构图
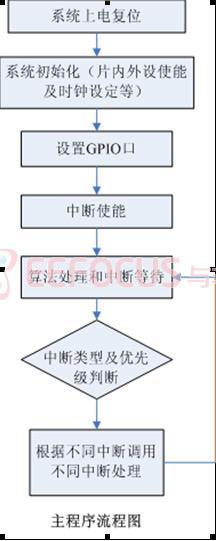
3.4 系统软件流程
该系统选用Linux操作系统作为电梯核心控制器的软件平台。应用层是整个系统的核心控制层。我们在该层实现电梯的主要功能,采用优先调度的算法,实现电梯各种运行状态间的转换。一旦出现故障系统便转换到故障模块对各种故障进行处理;存在呼梯信号时系统便转换到群控模块;长时间没有接收到呼梯信号时系统便转换到休眠状态。
该系统的主程序和故障模块流程图如下:
(1)主程序流程图如下:
(2)故障模块
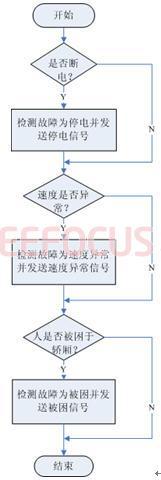
故障模块流程图
(3)群控模块:
电梯群控系统派梯调度算法流程如下:
(1)更新呼梯信号序列,通过交通流模式识别模块获取当前交通流模式并确定调度策略。
(2)通过交通流数据采集模块获取当前电梯运行状态数据。
(3)对呼梯信号序列中的每一个呼梯信号计算其每台电梯响应的可信度。
(4)当电梯发生客流量或呼梯信号变动则跳转到(1)

电梯群控系统调度图
3.4 系统预计实现结果
(1)在远程控制系统的监视器上能够准确的显示每个电梯的压力、电流、速度等信号变化图像
(2)远程控制系统能够实时监控电梯情况
(3)远程控制系统能得到电梯的能耗情况
(4)轿厢显示屏能显示当前电梯运行状态
(5)轿厢显示屏能显示电梯运行时预估计到达目的层的时间
(6)报警成功时报警指示灯能成功被点亮



评论