改进的五元十字炸点声定位算法研究

作者 刘敏 雷鸣 西安工业大学 电子信息工程学院(陕西 西安 710021)
本文引用地址:https://www.eepw.com.cn/article/201705/359755.htm*基金项目:陕西省科技计划项目(编号:2015GY018);本成果受西安工业大学科研创新团队建设计划资助
刘敏(1987-),女,硕士,助工,研究方向:动态测试及控制工程;雷鸣,男,硕士,副教授,研究方向:通讯工程。
摘要:针对四元十字阵声定位算法精度易受探测目标方位角影响的问题,提出采用基于五元十字阵被动声定位算法。根据试验测试特点,研究了五元十字阵探测阵元间的空间关系及TDOA被动声定位算法的特点,建立改进的五元十字阵被动声探测模型。利用微分法从炸点方位角和探测阵元间距两方面分析系统测量误差。经仿真分析和试验验证了炸点方位角只有在与X轴成1.5rad时对目标的定位误差影响较大,以及炸点定位误差随着探测阵元间距的增大而减小,对空中炸点被动声定位的实际工程应用具有重要的理论指导意义。
引言
信息化作战是集海、路、空及电磁技术四维一体的战争模式,近年来,采用声学探测技术引起了很大的重视,尤其被动声定位技术在靶场测试、水下声探测等方面得到广泛应用。声探测元件的设计是声定位方法的关键技术,文献[2]中研究了基于平面三基阵的炸点定位算法,提出了立体五元十字声定位算法模型,并对其进行了定位误差分析;文献[2]、[3]、[4]和[7]研究了五元十字被动声定位的特点,从定位系统不同的探测参数分析了五元十字阵的定位精度问题,并相应地提出了改进方案。结果表明:五元十字阵被动声定位方法不能准确地探测目标相对于声阵列的参考方向,且方位角对声定位的精度影响很大,不利于指导实际工程应用。
为了改善这一问题,可通过增加声探测元件来确定炸点的正确方位,本文在基本五元十字阵的基础上,提出了一种改进的五元十字声定位模型,即在Z轴方向上增加一个声探测元件,提高了目标定位的精度。通过仿真分析,明确给出了方位角在1.5rad时对定位精度的影响最大。该方法对五元十字阵声定位的实际工程应用提供了重要的理论依据。
1 改进的五元十字阵声定位算法
1.1 平面短基线三点阵声定位算法
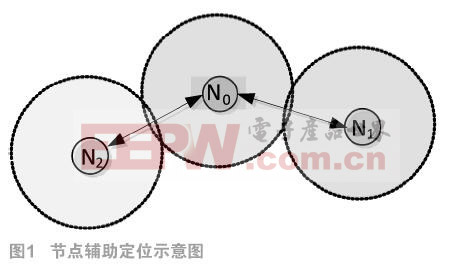
在近地炸点声定位系统中,采用平面短基线三点阵对空间目标进行定位,该方法解决了空间立体阵列布阵困难和计算量大的问题。基于短基线三点阵平面目标定位系统结构原理如图1所示。

图中P点代表空中炸点的位置,设其坐标为(x,y),A、B、C分别表示三个声学传感器的布站位置,且三个传感器之间的距离均为d。以第B点声传感器所在位置作为系统的坐标原点,建立坐标系,则三个传感器的坐标分别为(-d,0)、(0,0)、(d,0)。设爆炸点P到三个传感器之间的距离分别为l、m、n,根据TDOA被动声定位算法原理及图1中各传感器之间的几何关系可得:

由方程组(2)、(3)可得:
 (4)
(4)
1.2 改进的五元十字阵定位算法
通过对平面短基线三点阵声定位算法的分析,可看出该算法是实际可行的,但该方法只能够定位二维平面上的声学目标,因此,为了能够检测声学目标的三维坐标,本文提出了一种改进的五元十字声定位模型,其模型结构如图2所示。

以传感器0的位置作为坐标原点,另外五个传感器均位于坐标轴上。各传感器到坐标原点的距离均为d,即六个传感器的坐标分别为:(0,0,0)、(d,0,0)、(0,d,0)、(-d,0,0)、(0,-d,0)、(0,0,d)。设空中炸点距每个探测器的距离为R,将三维立体空间转换成两个相交的平面,进而得出声学目标的三维坐标。根据传感器之间的几何关系以及TDOA定位算法原理,可得如下方程组:
 (6)
(6)
根据改进的五元十字阵定位模型布站方式,设t为炸点从P点到坐标原点所用的时间,t10、t20、t03、t04、t05分别为声波到传感器1-0、2-0、0-3、0-4和0-5所用时间之差,c为声速,则表达式(6)可化简为:
 (7)
(7)
根据平面三点阵算法的特点,将此改进的五元十字阵声学定位模型转化成两个相交平面三点阵,即XOP平面和YOP平面,分别形成103和402两个平面三点阵。设炸点P在XOP平面上的方位角为![]() ,在YOP平面上的方位角为
,在YOP平面上的方位角为![]() ,由以上的推导公式可得炸点的x,y坐标:
,由以上的推导公式可得炸点的x,y坐标:

由改进的五元十字阵几何关系可得炸点的z坐标为:
![]() (10)
(10)
由式(10)可以看出,在求解炸点空间坐标z时,无法有效地实现精确的定位,即无法确定炸点位于传感器阵列的上方还是下方。为了解决上述问题,在Z轴正上方增加一个传感器5,根据传感器0与传感器5之间的时间差,确定声学目标的具体方位。当t05>0时,炸点在该平面上方,z取正值;当t05<0时,炸点在该平面下方,z取负值。







评论