基于ZigBee技术的车路协同调速系统

2.2 微控制模块
采用TI公司Msp430F169作为微控制器, 单片机的结 构以低功耗为核心,设计了五种低功耗模式,可最大延长 电池寿命以利于无线组网的测量应用。它采用“冯-纽曼” 结构, R A M、 ROM和全部外围模块都位于同一个地址空 间内。超低功耗Flash型16位RISC指令集、16位CPU、16位 计数器和恒定的时钟频率,使得单片机可以最大效率执行 程序, 自身强大的处理能力和分时复用的I/O口资源、 12 位DAC可满足车流高峰期的要求。这些显著的特点正适用 于无线传感器网络等低功耗系统。模块间的数据传输选用 RS485,其具有占用资源少、传输速率高、可实现联网等特 点。
2.3 ZigBee通信模块
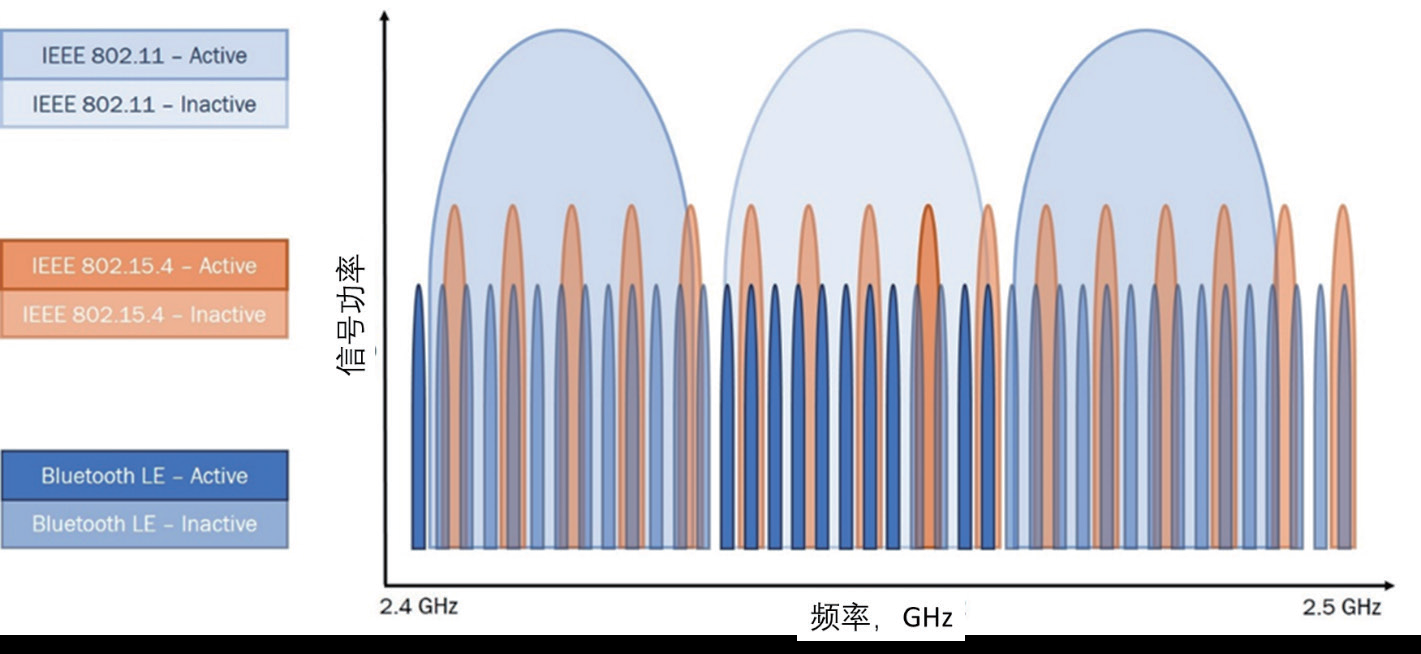
ZigBee是基于IEEE802.15.4标准的低功耗个域网协议, CC2530作为新一代2.4GHz SoC片上系统芯片,内部集成了 抗干扰性强和灵敏度高的RF收发器控制无线传输。另外, 标准增强型8051微处理器能更好地执行读取状态、发出命 令、自动操作和确定无线设备等功能。无线设备还包括一个 数据包过滤和地址识别模块。
CC2530内部的USART 0和USART 1适合高吞吐量的全
双工应用,满足高速密集车流量的应用。它内部集成12位 ADC、支持IEEE 802.15.4 MAC协议的MAC定时器、丰富的I/ O引脚资源、用于供电模式转换的超低功耗睡眠定时器,需 要的外围分立元件很少,提高了ZigBee通信模块的稳定性。 模块选用双极PCB非平衡天线,振荡频率满足信号的发射需 求。整个系统具有使用方便、价格低廉、工作可靠等特点。 电源模块采用电池供电即可满足需求;如有必要可加上太阳能充电装置。
3 内部系统软件设计
整个软件系统包括数据采集与车速换算程序、数据打 包无线发送程序、车载接收和处理显示程序。为了满足低 功耗的设计要求,路测系统内部程序采用睡眠和工作两种 模式。车辆检测器检测不到触发信号时,Msp430F169进入 睡眠模式;检测不到串口传输时,CC2530也会进入睡眠模 式。地感线圈一旦检测到车辆的到来,整个系统就会被唤醒 进入正常工作状态!程序流程图如图4所示。
路测系统初始化完成后便进入低功耗模式。初始化包 括定时器预分频器和中断的设置。Msp430F169的定时器是 带有七种捕获功能的16位定时/计数器,支持倍数捕获,并 具有强大的中断能力,可在计数器溢出时和捕获比较时触发 中断。数据采集与换算、同设定值比较和数据打包发送与反 馈是软件设计的重点和难点。DMA控制器允许不经CPU干 预直接处理数据,加快车速的换算与比较,同时,它能够在 向CC2530串口发送数据前使CPU保持在睡眠状态来减少功 耗。
4 测试实验
结合实际需要,分别在“变道分流”路段和“变道行 驶”路段提供车速调整提示信息,因此地感线圈布设两处, “变道分流”路段起始处参照《道路交通标志标线设计规范
(GB5768-2009)》规定的预告标志处,确定布设在逆行车 方向距高速公路匝道出口2km处。
第二处地感线圈的布设位置由“变道行驶”路段长度 决定,还要结合车辆变道安全距离模型确定;以西宝高速
(单向4车道)构建模型,基于最不利情况考虑,即要进入 匝道的车辆由最内侧快车道变换至最外侧。求得西宝高速 “禁止变道行驶”路段的长度为584m,计算过程如下:
车 辆 换 道 期 间 行 驶 距 离 : 车 道 宽 3 . 7 5 m , 车 速 按
1 0 0 k m / h , 换 道 时 间 ∆t 取 值 7.5 ~ 11.25s 。 t0 为 制 动 预 备 时 间 , 是 驾 驶 人 反 应 时 间 t01 和 制 动 器 作 用 时 间 t02 的 总 和 0 . 5 - 1 s 。 地 面 制 动 力 , 其 中 G = mg , g 取
9.8 m2 s , 为 制 动 力 系 数 ; 汽 车 能 达 到 的 减 速 度 为
; 鉴于A BS 的广泛运用, 取 , 平均减
速度 。文献[6]定为0.4,则 a =9.1× 0.4 = 3.64m2 / s
。 实 际 换 道 过 程 取 a = 0.8a = 0.8 × 3.64 = 2.91m2 s 。
S = 10.5v + 3 v ∆t − 9 a∆t 2 =10.5 ×100 ÷ 3.6+ 3 × (100 ÷ 3.6)×11.25- 9 × 2.91×11.252 = 422.4m
车辆制动距离 S = t v + v 2 2a S = 100 ÷ 3.6 × 2.0 + (100 ÷ 3.6)2 ÷ (2 × 3.64) = 161.6m
安 全 车 距 D = S = 161.6m , 最 大 安 全 换 道 距 离 E =S1 +D=584m 所以,第二处地感线圈应布设在逆行车方向 距匝道出口600m处。
车 载 设 备 向 驾 驶 人 提 供 辅 助 驾 驶 等 信 息 。 设 计 基 于
Android系统的APP软件,模拟车载设备对接收信息的处理与 显示,并通过声音、图像向驾驶人员提供智能辅助调速的功 能。如图5所示。
5 结语
本设计开发了一种基于ZigBee技术的车速辅助调节系 统,智能辅助车辆按照设定标准行驶,在整体上调节高速匝 道出、入口等路段的车速分布离散情况,从而最大程度地降 低车辆在匝道出入口路段发生碰撞事故的可能性,有效提高 高速公路的安全服务水平。随着车联网技术的进一步发展, 可以进一步对驶入特殊路段的各个车辆进行跟踪式监测,从 而达到动态监测每一辆行驶汽车,并通过车载设备随时将变 化路况实时显示给驾驶员的目标!
参考文献:
[1] 张文春,汽车理论[M].机械工业出版社 2009.
[2] 侯典建,孙小端,贺玉龙.高速公路车速离散性与事故率的关系研究[J].交 通标准化 2010(13).
[3] 邓奕.鞠静文.地感线圈在车辆通行自动检测控制系统中的应用[J].价值 工程 2014(5).
[4] 孙丛君,张喜茂,段国艳.智能停车场车辆检测系统的设计与实现[J]. 自动化信息 2008(3).
[5] 周松盛,何天明,张明涛等.简易安全车距和高速公路安全视距计算模型 [J].北京汽车 2009(2).
[6] Wilson D G. Bicycling science[M].Mit Press,2004.







评论