基于ZigBee技术的车路协同调速系统

引言
国外研究表明,车速的差值越大,车速分布越离散, 事故率就会越高。蒙纳斯大学事故研究中心在1993年进行研 究得出的U型曲线,表明车速与平均车速的差值越大,事故 率越高。英国交通研究实验室的EURO模型也表明事故率与 车速分布有很大关系,平均车速和车速差异都会影响事故 率,当均速为60km/h时,车速差异每降低1km/h,事故率将 降低2.56%。
图1 基于ZigBee技术的智能车路协同系统框 
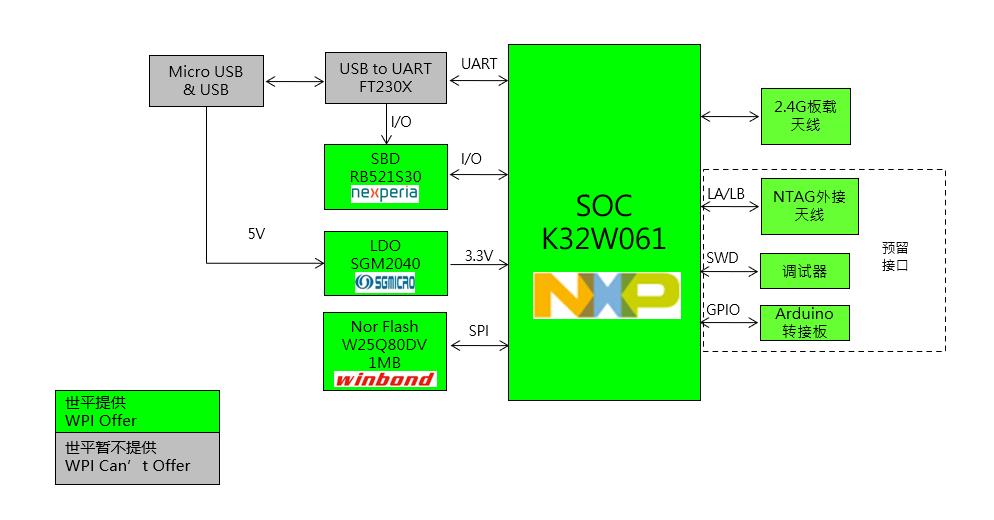
图2 基于ZigBee技术的智能车路协同硬件系统框图
国内学者对京津塘高速公路全线事故率进行统计研究 的结果表明: 尾随相撞占事故率的53.6%; 速度差在15—
2 0 k m / h 内事故率显著上升。 国内其他研究也表明, 可将20km/h视为速度差的安全阈值[1-2]。但是,高速公路的主线 与匝道之间的平均车速却存在显著差异:高速主车道均速一 般为100km/h,匝道出入口均速为60km/h。二者存在40km/h 的速度差,远大于安全阈值。因此,高速公路匝道出入口处 是事故多发路段。为了改善事故多发现状,仅仅在匝道附近设置路标的 效果非常有限。本设计基于车联网技术,设计了一种基于 Zigbee技术的车速辅助调节系统,旨在改善车速分布的离散
程度,辅助驾驶员安全通过事故多发路段。
1 系统整体设计
智能车路协同系统主要用于高速匝道地段,旨在实现
智能辅助驾驶。整个系统分为路测和车载两大部分,两者之 间通过低功耗局域网协议ZigBee(又称紫蜂协议)技术进行 通讯,使车路更加紧密协调,智能地连成一个整体。系统如 图1所示。
路测部分包括车辆自动检测模块、微控制单元模块、 ZigBee无线发射模块和电源供电模块。鉴于高速公路匝道出 入口的野外应用环境,系统内部选用超小型、低功耗的器 件,这样既可以有效缓解电源供电的问题,又便于安装和维
护。
车载部分包括车载设备和ZigBee无线接收模块;接收模
图3 动态车辆检测电路原理图 
图4 系统程序流程图
块接收发射模块的数据,车载设备处理接收数据并以声音或 图像的方式提醒驾驶员,实现智能辅助驾驶的设计目标。
2 各部分硬件设计
整个硬件系统由车辆自动检测模块、Msp430F169微控 制器模块、ZigBee通信模块、车载设备模块和电源供电模块 构成。结构框图如图2所示。
2.1 车辆检测模块
模块主要由地感线圈和车辆检测器构成。其中,地感 线圈采用0.75mm铁氟龙导线绕制;车辆检测器采用单通道 探测器(型号TLD-110),通过内部继电器动作完成信号的 输出。
其工作原理为:车辆驶过埋置有地感线圈检测单元的
图5 基于Android系统的APP客户端
路 面 时 , 会 引 起
地 感 线 圈 电 感 值 的 变 化 ( 经 测 量 绕 制 的 地 感 线 圈 电感量为100uH左 右 , 车 辆 碾 压 会 产 生 5 0 u H 左 右 的
变 化 ) , 进 而 导致振荡电路输出波形频率出现明显的变化,从而产生触发信 号,使MCU对接受到的信号进行分析处理。两组地感线圈 检测单元的间隔距离一定,通过触发时间差就可计算出车辆 行驶的速度。车辆检测电路原理图如图3所示。
整个电路由地感线圈耦合电路、谐振电路、锁相环电 路组成。设计采用电容反馈三点式谐振电路,将起始基准频 率设计在100kHz左右以提高测量精度,完全满足交通部下 发的GB/T26942-2011规定。T1为隔离变压器,匝数比为1:
1,地感线圈L1作为谐振电路中的电感元件。利用锁相环译 码器LM567与外接的环路低通滤波网络来检测车辆引起的频 率变化,并将地感线圈的频率变化转变为高低电平输出给后 续的控制模块。







评论