垂直侵彻深度计算算法研究

3 基于扩张状态观测器的永磁同步电机算法
永磁同步电机受电机参数(如电阻、电感、惯量以及磁链)变化、外部负载扰动和非线性等因素的影响。由于难以实现基于精确电机模型的解耦,经典控制很难克服这些不良影响,无法取得令人满意的控制效果,因此采用先进的电机控制算法提高交流调速系统的性能成为研究热点。
由于扩张状态观测器可观测出系统状态和自动补偿系统的内外未知扰动(外扰和未建模动态),理论上对负载扰动、电机参数变化都有较强的鲁棒性。将扩张状态观测器应用于自抗扰控制器的设计,可获得较好控制效果,但该控制器有多个可调参数,不易于丁业应用中参数调试。为简化控制器设计,减少可调参数,采用线性扩张状态观测器观测电机模型状态和扰动,使得控制器设计更简单,需调节参数更少。以一阶为例,介绍如何构造线性观测器。对于一阶系统:
![]()
式中,y为系统输出,f(x,t)为未知的非线性时变函数,w(t)为外部扰动,u(t)为控制输入,b为模型参数,b0为b的估计。
令系统的总扰动项a(t)=f(y,t)+w(t)+(b-b0)u(t),该扰动项包括内部扰动f(y,t)+(b-b0)u(t),也包含外部扰动W (t)。把a(t)作为一个扩张的状态,令x1=y,x2=a(t),则式(6)的动态系统可写成如下状态方程:

式(7)中,令c(t)=a(t),则可以构造出线性ESO:
式中,-p为观测器二重极点,p>0。
对应的线性控制律为:
式中,y*为系统的参考输入。
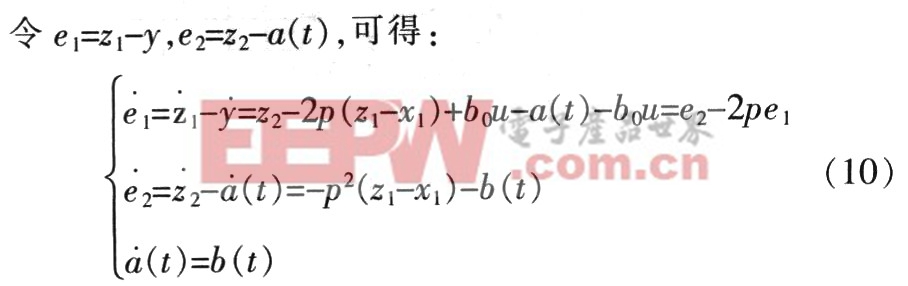
这是一个二阶连续系统,其稳定的充要条件是二重极点P>0。只要选择合适的期望闭环极点-P>(p>0),就能保证ESO的观测效果。
根据永磁同步电机的一阶微分方程模型,结合扩张状态观测器的设计方法,设计控制器,分析如下:


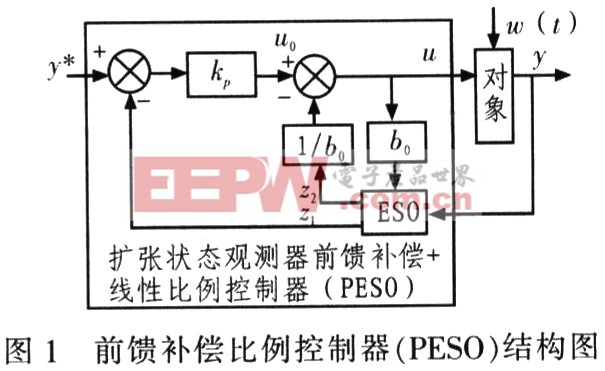
由式(11)~(12)可看出,负载转矩、摩擦系数、惯量的扰动以及由于b0估计误差所造成的扰动都可在a(t)中反映出来。如果能对a(t)进行观测并予以补偿,则可显著的提高系统的抗扰动能力。控制器结构图如1所示。
于是得到基于扩张状态观测器的比例控制器的表达式:
(1)ESO表达式: 
(2)控制律表达式:
根据理论分析,ESO的观测效果取决于极点-p>(p>0)。和ESO的跟踪速度有关,P越大,ESO跟踪输出信号响应就越快,即z1对速度w的响应就越快。比例增益kp通常应取得较大,但过大会使速度响应振荡,造成系统不稳定。



评论