基于DSP的发电机原动系统仿真器设计与开发

关键词:DSP;离散化处理;原动系统;动态特性
0 引言
原动系统(包括其调速系统)是影响电力系统机电瞬时过程一个重要的因子,不仅可以影响系统频率和发电机有功功率的调整,而且对电力系统的瞬时稳定和异步运行影响极大。因此,研制原动系统仿真器,建立室内电力系统,在实验室内对电力系统的真实原动机(主要是水轮机和汽轮机)及其调速系统与自平衡特性进行模拟,是对电力系统进行研究的重要工具。早期的原动机仿真系统,多采用模拟电路[1,2],存在结构复杂、电子元器件容易老化、易受环境温度影响和抗干扰能力差等缺点,且只能模拟原形系统的部分环节,难以模仿整个系统,准确度不高。本文所阐述的原动机仿真系统中采用数字电路,利用计算机软件去实现和取代相关模拟电路的功能,硬件结构简单、可靠;采用液晶显示器实时显示各运行参数,用户操作便捷,显示直观。
1 原动系统仿真基本原理与数学模型
原动系统模型原理框图如图1。
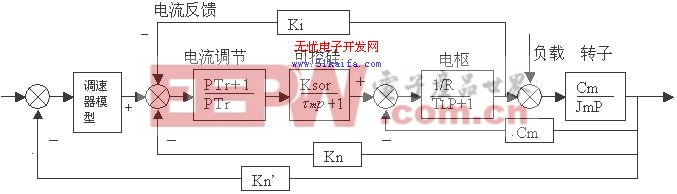
图1 原动系统原理框图
各环节的传递函数[2]如下:

汽轮机 
水轮机 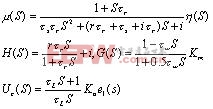
2 控制电路硬件设计
同步发电机原动系统仿真器的基本结构:用直流电动机和晶闸管直流传动系统作为模拟发电机的原动力。其硬件电路包括一次主回路和微机控制电路,主回路由整流变压器、三相全控整流桥和电抗器等组成。微机控制电路以DSP(Digital Signal Processor)为控制核心。
本系统中DSP采用TI公司的32位浮点 TMS320C6711B[3]。TMS320C 6711B采用改进的哈佛总线结构,主频为150MHz,内部集成硬件乘法器和累加器,采用流水线VelociTITM甚长指令字(VLIW)指令,具有丰富的片上外设,并有专门针对数字信号处理的指令系统,运算能力可达1200MFLOPS,能满足控制系统的要求。
3 微机控制系统的软件设计
本系统把模拟式调速器转化为数字式调速器,模拟式电流调节器转化为数字式电流调节器。用单片机取代模拟运算放大电路,通过编程来实现控制特性的仿真。主要包括主程序、调速器、数模转换与数字的读取、测速、液晶显示、按键处理、电流调节器、移相触发和继电保护等子程序,各程序采用模块化编程。其设计思想是首先获得水轮机、汽轮机调速系统以及水汽管道和电流调节器的数学模型,再进行离散化处理,写出对应的离散化方程,最后运用汇编语言或C语言进行编程。设计中将差分法运用到了PID控制中。这样,选择合适的采样周期T后,若连续时间模型对应的是一个稳定系统,那么离散形式也对应一个稳定的系统。参考文献[4]给出了错油门环节、飞摆环节、油动机环节、反馈环节的连续模型和离散化方程(差分方程)。
主程序分为两个大的部分:开机前的运行整定和开机后的运行控制。即各运行控制参数的整定计算和存储;打开中断,允许中断服务程序调用汽轮机(水轮机)调速器对电动机的运行进行实时控制;对电动机的速度,电枢电流,电枢电压,励磁电流进行循环采样和监测保护;实时处理用户的输入,并根据用户要求及时对电动机的运行状态进行调整;将电动机的运行参数在LCD上显示出来,为用户提供一个良好的人机接口。参考文献[4,5]给出了主程序、数字调速器、数模转换与数字的读取、测速、液晶显示、按键处理等子程序的设计思想及流程图。
本文主要介绍电流调节器、移相触发和继电保护等子程序的设计。
3.1 电流环子程序
3.1.1电流调节器的差分方程

3.1.2电流环子程序
DSP芯片通过高速入口捕捉光学编码器的脉冲信号,经过软件处理得到实时转速,对速度环节,依差分方程得出原动机的输出功率Pm(K), 以Pm(K)作为电流调节器的给定值,按图3进行流程计算,最后给出一个和晶闸管延迟角α相对应的控制量Uc(K)。
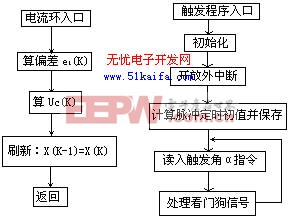
图3 电流环子程序流程图 图4 移相触发子程序流程图
3.2移相触发子程序
由单片机产生所需的晶闸管移相触发脉冲,必须包括同步电压检测环节、移相延迟角定时环节、触发脉冲时序分配环节等部分,与模拟电路实现的方法类似。产生触发脉冲的控制软件如图4所示。
3.3继电保护子程序
完善可靠的报警保护系统对于保证试验过程中的人身和设备安全具有重要意义,本文重点研究和实现了完善的保护功能。主要包括:过速保护、过流保护、过压保护、失磁保护、仿真器内部故障(包括CPU等)、红外线测速装置故障保护等六个方面的保护。保护动作值可以根据需要进行整定。计算机对检测到的参数进行判断和处理,当检测到控制系统出现过速、过流、过压、失磁等故障时,立刻启动保护电路,使主回路跳闸、迅速切除故障,同时发出声光提示信号并指明故障类型。以下是采用汇编语言编写的飞车(失磁)保护子程序。
ORG 3500H
Excition_lose: LD AX,#C7FFH ;送控制字地址,A1A0=11B
LDB BL,#92H ;输入控制字,方式0
STB BL,[AX] ;将方式控制字送送端口
DEC AX ;指向C口,A1A0=10B
LDB BL,#04H ;
STB BL,[AX] ;Pc.3=1跳失磁出口保护继电器
RET
4 现场测试及实验结果分析
4.1静态性能测试
切除调速器,使同步发电机有功至满载运行,稍微改变负载,电动机将出现自平衡状态,由此可得到在额定转速附近的M-n曲线,如图5所示。
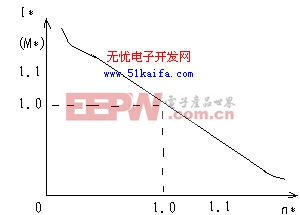
图5模拟原动机的机械特性
由图5可见,模拟原动机的机械特性在额定转速附近基本上是线性的,斜率可通过调整电流和转速的反馈比来实现,因此直流电动机模型与真实原动机相同。
4.2 动态性能测试
将调速器投入,使模拟发电机正常启动,转速升至额定值后满负荷运行,突然100%甩负荷,记录转速的变化过程,水轮机的录波图(部分)如图6所示。曲线与同步发电机甩负荷的转速调节过程完全一致。改变某一参数重复上述试验,然后进行比较,可以得出:τ0和τs中任意一个加大,动态特性变差,转速过渡过程时间增长;δ,τw和τrk 中任意一个加大,动态特性变好,转速过渡过程时间减少。录波图所显示出的水轮机输出波形的变化过程与实际情况相符,充分体现了电力系统动态模拟试验再现试验对象真实物理过程的特点。

图6水轮机突然100%甩负荷转速的暂态响应录波图(部分)
5 结论
本文设计的同步发电机原动系统仿真模型,以DSP芯片为控制核心,通过调速器模型与电流速度双反馈,实现了对原型调速器、水汽管道以及自平衡特性的仿真。录波图所显示出的原动系统仿真模型动态特性波形的变化过程及其基本规律与实际调速系统情况相符;改变调速系统仿真模型的参数值,达到了对原型调速器不同参数下动态特性进行模拟的预期目的,充分显示了电力系统动态模拟实验再现试验对象真实物理过程的特点。录波图证明:该原动系统仿真器具有动态性能好、响应快的优点,较为准确地反映了变化参数对原动系统带来的影响。
本文作者创新点:(1)采用DSP芯片取代相关模拟电路或80C196KC芯片的控制功能,突破传统模拟控制与数模混合控制模式,简化了硬件构成,并实现对原动系统仿真器的全数字控制。(2)采用液晶显示器实时显示各运行参数,用户操作便捷,显示直观。
[参考文献]
[1] 刘觉民,夏永祥.模拟发电机组专用可控硅直流调速系统[J].湖南大学学报,1995,22(3): 80-85.
[2] 覃平生,刘觉民,等.基于80C196KC的原动机仿真系统设计[J].电力自动化设备,2003,23(2):41-45.
[3] 陈仕高,姜久春,牛利勇.DSP在直流无刷电机中的应用[J].微计算机信息,2006,24(1-2): 143-145.
[4] 刘觉民,颜小君,付振宇.模拟原动机调速器的数学模型与程序设计[J].低压电器,2006(3).
[5] 刘觉民,付振宇,谭立新,等.发电机原动系统仿真器程序设计[J],湖南大学学报,2005,32(1):29-32.
[6] IEEE Committee Report Dynamic Models for Steam Hydro Turbines in Power System Studies[J]. IEEE Trans,1974,89(1):1904-1915.










评论