基于MCS-51单片机的雷达模拟训练卡设计

0 引言
本文引用地址:https://www.eepw.com.cn/article/173836.htm动目标侦察雷达通常采用单脉冲全相参脉冲多普勒工作机制来有效提取复杂地杂波下的动目标信号,这种方法能有效跟踪活动目标,提取目标的距离、方位、径向速度等有用信息。该方法在民用领域主要用于边防哨所的侦察警戒,军事上则主要对战场活动目标进行监视,因此,动目标侦察雷达正逐渐发挥出其重要作用。由于地面运动目标种类多样,运动方式不同,产生的运动轨迹和多普勒音响差异很大,因此,为了能快速发现并跟踪目标,降低对雷达操作手的要求,本文给出了一种通过雷达模拟训练卡来为雷达操作手提供逼真训练环境的具体方法。
1 总体设计思路
目前各科研院所研制的目标模拟器主要是对雷达信号的模拟,根据模拟信号频率不同可分为射频、中频、视频信号的模拟。此类模拟器主要用于对雷达性能指标的测试,其结构复杂但功能强大,造价也比较高。本文所研制的动目标模拟训练卡主要用于训练雷达操作手,而不用于检测雷达性能指标,因此结构简单。同时可将其制成雷达电路板的通用型号,并可直接通过接口电路置于雷达机箱内,操作携带都很方便。
动目标模拟训练卡能模拟雷达的背景信号和动目标信号,可在不加高压的情况下为雷达操作人员提供较为逼真的训练环境。该模拟训练卡能在 0 °~ 360 °的范位内模拟固定目标和动目标,其模拟运动目标的类型有单兵、轻型车辆、重型车辆、直升机、坦克等。
该动目标模拟训练卡采用微型计算机的设计思路。其整体结构如图 l 所示。
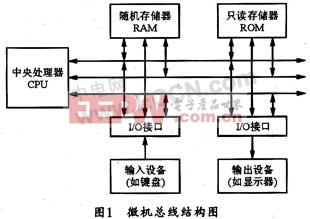
系统中的 MSC-51 系列芯片 80C 31 主要用于控制从 RAM 和 ROM 读取背景、目标、多普勒音响等存储信息;输入设备采用雷达自身的薄膜操作键盘和距离/方位手轮;输出设备采用雷达的 CRT 显示器。这样能使雷达操作人员快速熟悉键盘上各指令的操作位置及雷达装备的结构特征,避免重复设计的浪费,达到模拟雷达操作人员训练的最终目的。
2 雷达动目标模拟训练卡电路组成
雷达模拟训练卡的电路组成主要有 CPU 控制电路、背景产生电路、动目标产生电路和多普勒音响产生电路。图 2 为该训练板的电原理图。

与其它雷达信号模拟器不同的是,该模拟雷达操作手的动目标信号首先存储在动目标模拟训练卡内,这些存储的信号都是在雷达正常工作时录入的,信号特征真实可靠,从而有效避免了其它雷达信号模拟器可能因自身模拟信号的产生故障而达不到训练要求的困难。
动目标模拟训练卡的工作过程是:首先由 CPU 根据当前薄膜键盘和控制手轮录入的雷达方位码和雷达状态信号中的距离起点信息,调出预先存储有各种动目标的声音信号和背景信号。然后通过背景产生电路和动目标产生电路送出相应显示段的背景信号和动目标信号,同时根据雷达状态信号中的光标信号来判决当前的方位和距离上是否有动目标,若有则通过多普勒声音产生电路送出相应的声音信号。
3 具体电路设计及功能实现
CPU 控制电路是系统电路部分核心,其余的背景产生电路、动目标产生电路、多普勒声音产生电路都由 CPU 根据雷达当前状态决定其工作方式和内容。雷达状态主要包括主时钟信号、录取光标信号、距离推移信号、背景采样信号等,其中从距离推移信号可得到当前显示的距离段,而从录取光标信号加距离推移信号则可得到当前显示的距离段上某一点的距离。微机数据总线可送来雷达状态信息,如扇扫、显示范围等。
3.1 CPU 控制电路
CPU 的主要任务是按预定算法计算各动目标的运动方向和位置,更新动目标数据库的数据,并根据方位和距离起点信息送出相应显示段的动目标信号。本训练卡的 CPU 采用 MCS-51 系列 80C 31 芯片,其 CPU 控制电路如图 3 所示。
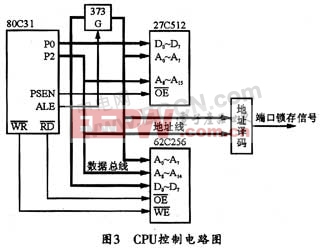
系统程序存储器采用 27C 512 ,保证有 64KB 的程序空间给监控程序使用,数据存储器则采用 62C 256 ,它有 32KB 的 RAM 可使用,地址译码电路可产生若干端口信号,这些端口信号可控制训练卡的输入输出缓冲等接口,以保证从系统得到正确的输入控制信号,并通过输出端口控制输出。在电路中, RAM( 62C 256) 占有 0000-7FFFH 的地址,剩余的地址分配给端口使用。










评论