基于Atmega16单片机的重物提升控制系统设计

随着微电子技术的发展,电气控制方式变得更加灵活多样,控制精度越来越高。智能化控制中越来越多地采用了以单片机为核心的控制单元实现设备的智能化控制。介绍以Atmega16单片机为控制核心,实现重物提升位移量的精确控制。
1 重物提升控制系统原理
重物提升控制系统的设计目的是使用智能化的控制技术,将重物提升到预定高度。如图1所示是系统控制结构图,从控制结构图可以看出,控制系统研究对象是重物的提升和降落。主要的控制对象是卷扬机,通过卷扬机的正、反转运动实现控制目标。
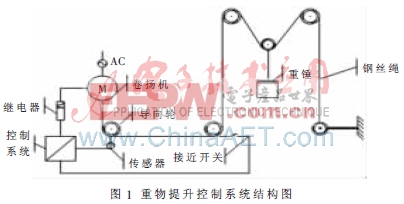
图中传感器选用光电编码器,光电编码器的转轴上安装一个轮,将其固定在导向轮上,这样光电编码器和导向轮同轴旋转,实现光电编码器转过的角度与导向轮转过的角度相等,重物提升的距离就是导向轮周长和转过总角度的乘积。设导向轮的直径为d,与其同轴连接的光电编码器每圈输出脉冲数设为k,那么脉冲当量为: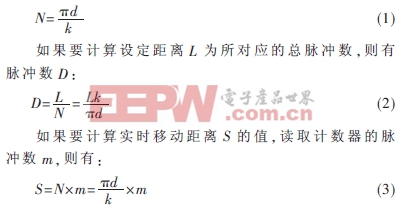
2 单片机主从结构的控制方式
工程设计研究对象是控制卷扬机的转动,提升重物到预定高度,需要在运行前计算出运行的总脉冲数;设计要求显示屏能实时显示重物的高度,需要在运行中对采集的数据实时处理,计算出移动的距离;还要求对重物高度和导向轮周长进行设定,设定参数要能够存储和读出,这就需要带有存储功能的智能化器件。Atmega16单片机能够完成数据处理,内含EEPROM存储区,在掉电的情况下也能够保存数据,内含2个外输入计数器,能够实现计数任务,可以简化硬件电路。综合考虑,本设计选择Atmega16单片机作为核心器件实现任务要求。为了简化结构,突出模块设计,采用双芯片结构,以主、从机模式的设计方法实现控制要求。主机单元负责传感器信号的处理、人机界面参数设定、实时数据处理等工作。从机单元负责接收主机所发信号,响应主机决定是否输出实时的控制指令。
3 光电编码器测量位移
光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,这是目前高精度控制系统最常用的位移量测量传感器。光电编码器由光栅盘和光电检测装置组成,光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。原理示意如图2所示。通过计算光电编码器输出脉冲的个数就能知道当前拖动的位移量,还可以通过计算每秒光电编码器输出脉冲的个数实现速度测量。
用光电编码器测量位移时,不仅要知道位移的大小,还要知道位移的正负方向,判别方向是成功测量关键。现在市场上见到的光电编码器是4线接口或5线接口。4线接口的光电编码器能输出A、B两路脉冲,5线接口的能输出A、B、Z三路脉冲。光电编码器输出的A、B两路脉冲在相位上差90°,正转时A路超前B路90°,反转时B路超前A路90°。测量中依据A、B之间的相位差,就能够判别位移的方向符号,通过带符号的加运算,可以知道输出脉冲个数,计算出位移量。
4 传感器信号的提取电路设计
如图3所示是传感器信号提取电路。光电编码器输出的信号通过74LS244进行整形后,输出理想的A、B相波形,U3(74LS74)是D触发器,把传感器输出整形方波信号的A相输入D1,B相作为D触发器的时钟信号CK,U3与U9(7400)共同组成鉴相电路,判断光电编码盘是正转还是反转。
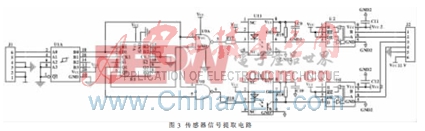
当光电编码器正向旋转时,通道A输出波形超前通道B输出波形90°,D触发器输出Q为高电平,Q为低电平,上面U9A与非门关闭保持高电平,计数脉冲不能通过U11;此时,下面U9B与非门打开,其输出计数脉冲D能够顺利通过U12进行传输,如图4(a)所示。
当光电编码器逆时针旋转时,通道A输出波形比通道B输出波形滞后90°,D触发器Q输出为低电平,Q为高电平,上面U9A与非门打开,其输出计数脉冲C能够通过U11进行传输;此时,下面U9B与非门关闭保持高电平,计数脉冲不能通过,如图4(b)所示。












评论