教你构造一个51单片机的实时操作系统

目前,大多数的产品开发是在基于一些小容量的单片机上进行的。51系列单片机,是我国目前使用最多的单片机系列之一,有非常广大的应用环境与前景,多年来的资源积累,使51系列单片机仍是许多开发者的首选。针对这种情况,近几年涌现出许多基于51内核的扩展芯片,功能越来越齐全,速度越来越快,也从一个侧面说明了51系列单片机在国内的生命力。
本文引用地址:https://www.eepw.com.cn/article/172555.htm多年来我们一直想找一个合适的实时操作系统,作为自己的开发基础。根据开发需求,整合一些常用的嵌入式构件,以节约开发时间,尽最大可能地减少开发工作量;另外,要求这个实时操作系统能非常容易地嵌入到小容量的芯片中。毕竟,大系统是少数的,而小应用是多数而广泛的。显而易见,μC/OS—II是不太适合于以上要求的,而Keil C所带的RTX Tiny不带源代码,不具透明性,至于其FULL版本就更不用说了。
1 Keil C51与重入问题
说到实时操作系统,就不能不考虑重入问题。对于PC机这样的大内存处理器而言,这似乎并不是一个很麻烦的问题,借用μC/OS—II RTOS的说法,即要求在重入的函数内,使用局部变量。但5l系列单片机堆栈空间很小,仅局限在256字节之内,无法为每个函数都分配一个局部堆空间。正是由于这个原因,Keil C51使用了所谓的可覆盖技术:
①局部变量存储在全局RAM空间(不考虑扩展外部存储器的情况);
②在编译链接时,即已经完成局部变量的定位;
③如果各函数之间没有直接或间接的调用关系,则其局部变量空间便可覆盖。
正是由于以上的原因,在Keil C51环境下,纯粹的函数如果不加处理(如增加一个模拟栈),是无法重人的。那么在Keil C5l环境下,如何使其函数具有可重人性呢?下面分析在实时操作系统下面,任务的基本结构与模式:
vold TaskA(void*ptr){
UINT8 vaL_a;
//其他一些变量定义
do{
//实际的用户任务处理代码
}while(1);
}
void TaskB(void*ptr){
UINT8 vaLb;
//其他一些变量定义
do{
Funcl();
//其他实际的用户任务处理代码
)while(1);
void Funcl(){
UlNT8 v al_fa;
//其他变量的定义
//函数的处理代码
}
在上面的代码中,TaskA与TaskB并不存在直接或间接的调用关系,因而其局部变量val_a与val_b便是可以被互相覆盖的,即其可能都被定位于某一个相同的RAM空间。这样,当TaskA运行一段时间,改变了val_a后,TaskB取得CPU控制权并运行时,便可能会改变val_b。由于其指向相同的RAM空间,导致TaskA重新取得CPU控制权时,val—a的值已经改变,从而导致程序运行不正确,反过来亦然。另一方面,Funcl()与TaskB有直接的调用关系,因而其局部变量val_fa与val_b不会被互相覆盖,但也不能保证其局部变量val_fa不会与TaskA或其他任务的局部变量形成可覆盖关系。
将val_a、val_b以及val_fa等局部变量定义为静态变量(加上static指示符)可以解决这一问题。但问题是,定义大量的static类型变量,将导致RAM空间的大量占用,有可能直接导致RAM空间不够用。尤其是在一些小容量的单片机内,一般只有128或256字节,大量的静态变量定义,在如此小的RAM资源状况下显然就不太合适了。由此而有了另一种的解决方法,如下代码所示:
void TaskC(void){
UINT8 x,v;
whlk(1){
OS_ENTER_CRITICAL();
x=GetX(); (1)
y=GetY(); (2)
//任务的其他代码
OS_EXIT_CRITICAL(); (3)
0SSleep(100); (4)
}
}
以上代码TaskC中使用了临界保护的方法来保护代码不被中断占先,确实有效地解决了RAM空间太小,不宜大量定义静态变量的问题。然而如果每个任务都采用此种结构,任务一开始,就关闭中断,将使实时性得不到保证。事实证明,这种延时是相当可观的。用一个实例来说明,如果想在系统中使用一个动态刷新的LED显示器,就难以保证显示的稳定与连续,哪怕在系统中是使用一个单独的定时器来做这一工作(进入临界区后,EA=0)。其次,这种结构事实上将占先的任务调度转化为非占先的任务调度。实际上如果在(3)与(4)之间没有碰巧发生中断并导致一个任务调度,那就可以理解为是任务主动放弃CPU的控制。如果在(3)和(4)之间碰巧产生了一个中断并导致了一个任务调度,只是执行了一次多余的任务调度而已,而且并不希望在(3)之后发生2次甚至多次的任务调度,相信读者也有这一愿望。
除此之外,还可以发现任务的一个特点:当任务从(1)重新开始时,局部变量x和y是一个什么值并不在乎,即x和y即使在(3)之后改变了,也已经不再重要,不会影响程序的正确性。其实这一特点也是大部分任务,至少是太部分任务的大部分局部变量的一个共性——如果任务在整个执行过程中,不会(被占先)放弃CPU控制权,则其局部变量大多数并不需要进行特别的保护,即其作用域只是任务的当次执行,针对上面的代码,就是临界保护区内的代码区域。
目前,大多数的产品开发是在基于一些小容量的单片机上进行的。51系列单片机,是我国目前使用最多的单片机系列之一,有非常广大的应用环境与前景,多年来的资源积累,使51系列单片机仍是许多开发者的首选。针对这种情况,近几年涌现出许多基于51内核的扩展芯片,功能越来越齐全,速度越来越快,也从一个侧面说明了51系列单片机在国内的生命力。
多年来我们一直想找一个合适的实时操作系统,作为自己的开发基础。根据开发需求,整合一些常用的嵌入式构件,以节约开发时间,尽最大可能地减少开发工作量;另外,要求这个实时操作系统能非常容易地嵌入到小容量的芯片中。毕竟,大系统是少数的,而小应用是多数而广泛的。显而易见,μC/OS—II是不太适合于以上要求的,而Keil C所带的RTX Tiny不带源代码,不具透明性,至于其FULL版本就更不用说了。
1 Keil C51与重入问题
说到实时操作系统,就不能不考虑重入问题。对于PC机这样的大内存处理器而言,这似乎并不是一个很麻烦的问题,借用μC/OS—II RTOS的说法,即要求在重入的函数内,使用局部变量。但5l系列单片机堆栈空间很小,仅局限在256字节之内,无法为每个函数都分配一个局部堆空间。正是由于这个原因,Keil C51使用了所谓的可覆盖技术:
①局部变量存储在全局RAM空间(不考虑扩展外部存储器的情况);
②在编译链接时,即已经完成局部变量的定位;
③如果各函数之间没有直接或间接的调用关系,则其局部变量空间便可覆盖。
正是由于以上的原因,在Keil C51环境下,纯粹的函数如果不加处理(如增加一个模拟栈),是无法重人的。那么在Keil C5l环境下,如何使其函数具有可重人性呢?下面分析在实时操作系统下面,任务的基本结构与模式:
vold TaskA(void*ptr){
UINT8 vaL_a;
//其他一些变量定义
do{
//实际的用户任务处理代码
}while(1);
}
void TaskB(void*ptr){
UINT8 vaLb;
//其他一些变量定义
do{
Funcl();
//其他实际的用户任务处理代码
)while(1);
void Funcl(){
UlNT8 v al_fa;
//其他变量的定义
//函数的处理代码
}
在上面的代码中,TaskA与TaskB并不存在直接或间接的调用关系,因而其局部变量val_a与val_b便是可以被互相覆盖的,即其可能都被定位于某一个相同的RAM空间。这样,当TaskA运行一段时间,改变了val_a后,TaskB取得CPU控制权并运行时,便可能会改变val_b。由于其指向相同的RAM空间,导致TaskA重新取得CPU控制权时,val—a的值已经改变,从而导致程序运行不正确,反过来亦然。另一方面,Funcl()与TaskB有直接的调用关系,因而其局部变量val_fa与val_b不会被互相覆盖,但也不能保证其局部变量val_fa不会与TaskA或其他任务的局部变量形成可覆盖关系。
将val_a、val_b以及val_fa等局部变量定义为静态变量(加上static指示符)可以解决这一问题。但问题是,定义大量的static类型变量,将导致RAM空间的大量占用,有可能直接导致RAM空间不够用。尤其是在一些小容量的单片机内,一般只有128或256字节,大量的静态变量定义,在如此小的RAM资源状况下显然就不太合适了。由此而有了另一种的解决方法,如下代码所示:
void TaskC(void){
UINT8 x,v;
whlk(1){
OS_ENTER_CRITICAL();
x=GetX(); (1)
y=GetY(); (2)
//任务的其他代码
OS_EXIT_CRITICAL(); (3)
0SSleep(100); (4)
}
}
以上代码TaskC中使用了临界保护的方法来保护代码不被中断占先,确实有效地解决了RAM空间太小,不宜大量定义静态变量的问题。然而如果每个任务都采用此种结构,任务一开始,就关闭中断,将使实时性得不到保证。事实证明,这种延时是相当可观的。用一个实例来说明,如果想在系统中使用一个动态刷新的LED显示器,就难以保证显示的稳定与连续,哪怕在系统中是使用一个单独的定时器来做这一工作(进入临界区后,EA=0)。其次,这种结构事实上将占先的任务调度转化为非占先的任务调度。实际上如果在(3)与(4)之间没有碰巧发生中断并导致一个任务调度,那就可以理解为是任务主动放弃CPU的控制。如果在(3)和(4)之间碰巧产生了一个中断并导致了一个任务调度,只是执行了一次多余的任务调度而已,而且并不希望在(3)之后发生2次甚至多次的任务调度,相信读者也有这一愿望。
除此之外,还可以发现任务的一个特点:当任务从(1)重新开始时,局部变量x和y是一个什么值并不在乎,即x和y即使在(3)之后改变了,也已经不再重要,不会影响程序的正确性。其实这一特点也是大部分任务,至少是太部分任务的大部分局部变量的一个共性——如果任务在整个执行过程中,不会(被占先)放弃CPU控制权,则其局部变量大多数并不需要进行特别的保护,即其作用域只是任务的当次执行,针对上面的代码,就是临界保护区内的代码区域。
2 实时操作系统要不要占先
由上面的分析,如果要保持一个函数可重人,就得使用静态变量,系统的RAM资源将是一个严峻的考验;如果使用临界区来保护运行环境,系统的实时性又得不到保证,而且有将占先式任务调度转为非占先任务调度之虞。显然,使用静态变量简单,但有更多的不适用性,对将来功能的调整也是一个阻碍,一般不被采用。那么,就只能从环境保护上来下功夫了,但是果真只能以进入临界区牺牲系统的实时性来保证任务不被占先?下面看看临界保护这一方法的基本思路:
①在一个任务中,如果局部变量在其作用域内不被占先切换,则这些变量在任务被剥夺了CPU控制权后,不关心其值也不会影响任务的正确执行;
②使用临界区保护,可以达到上面所提到的要求;
③由此导致的实时性能与占先切换的减弱可以接受。由此可知,不被占先是任务保护局部变量的关键。既然如此,何不舍弃占先式的任务调度?这不失为一个好的出发点。针对Keil C51,非占先式任务调度,可能是一种更好的方法,更能协调51系列单片机的既定资源。下面编写这样一个系统:
①使用非占先式任务调度;
②可以在小容量的芯片中使用,开发目标是,即使是8051这样小的芯片,也可使用这个实时操作系统;
③支持优先级调度,尽可能保证其实时性。
3 实时操作系统的实现
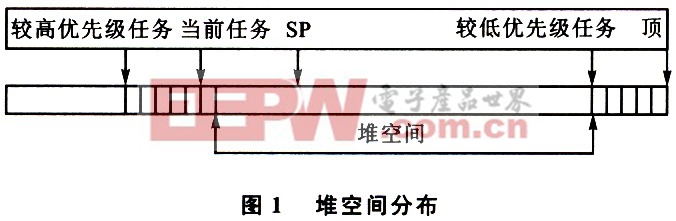
基于以上的分析与目的,近日完成了这个操作系统。在堆栈上借用RTx的管理方法,即当前任务使用全部的堆空间,如图1所示。
3.1 堆栈的初始化与任务的创建
堆栈的初始化实际是初始化0STaskStackBotton数组,并将当前任务指定为空闲任务,下一个运行任务指定为最高优先级任务,即优先级为零的任务。初始化时,将SP的值存人OSTaslkStackBotton[O],SP+2的值存入OSTaskStacKBotton[1],依此类推。而任务是调用0STa-skCreate函数建立的。实际上只是将任务(假设为n号任务)的地址填人到对应OSTaskStackBotton[n]所指向的位置,并将SP向后移动2个字节,如图2所示。
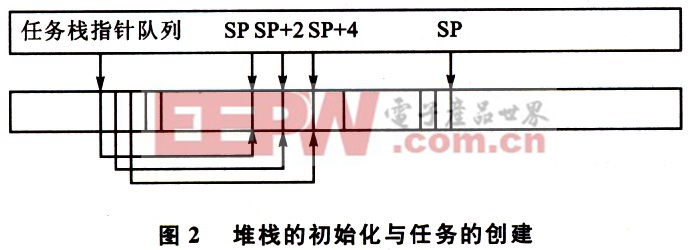
为什么要以这样一种规律而不是其他的方式呢?这是由于在任务建立后,还未进行任务调度之前,各任务的堆栈实际上是它们自身的地址,因而其堆栈深度为2,为了程序的简便而直接填入。
void main(void){
OSInit(); /*初始化OSTaskStackBcBotton队列*/
TMOD=(TMOD0XFO)│ 0XOl;
TL0=0xBF;
TH0=0xFC;
TRO=1;
ETO=1;
TFO=O:
OSTaskCreate(TaskA,NULL,0);
OSTaskCreate(TaskB.NULL,1);
OSTaskCreate(TaskC,NULL,2);
OSStart();
上面这段代码中,所有任务建立后,便调用OSStart()开始任务调度。OSStart()是一个宏定义,如下所示:
#deflne OSStart() d0{\
OSTaskCreate(TaskIdle,NULL,OS_MAX_TASKS);\
EA=l:\
return;\
}while(O)
首先,它创建了一个空闲任务并打开中断,然后便返回。返回到哪里了呢?我们知道,空闲任务是优先级最低的任务,当调OSTaskCreate建立时,会将其地址填人到SP的位置,并把SP向后移动2个字节(见图2及说明),因而此时处在堆栈顶端的,一定是空闲任务Taslddle。这就使得这里的return一定会返回到空闲任务。至此,系统进入正常运行状态。
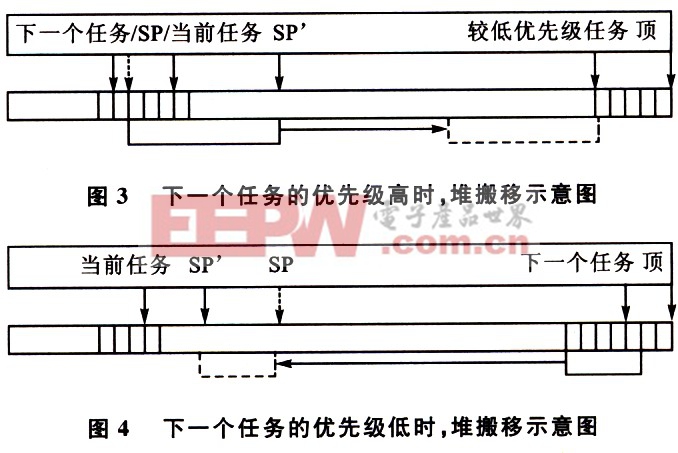
3.2 任务的切换
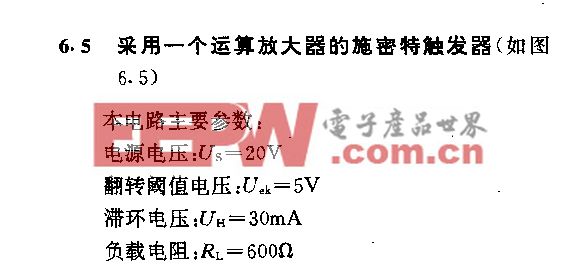
任务的切换分两种情况,在当前任务优先级低于下一个取得CPU控制权的任务时,将下一个取得CPU控制权的任务的栈顶到当前任务的栈顶之间的内容向RAM空间的高端搬移,以空出全部的RAM空间作下一个任务的堆空间,同时更新对应的OSTaskStackBotton,使其指向新的正确任务的堆栈栈底。如果当前任务的优先级高于下一个任务的优先级,则作相反的搬移,如图3与图4所示。
所有任务必须主动调用OSSleep,放弃CPU的控制权。任务调用OSSleep后,将选择优先级最高的就绪任务运行。
结 语
系统完成后,内核的代码量在400多个字节左右,占用1个定时器中断及小量的内存空间。系统设置容量为8个任务,用户实际可用任务为7个,能够满足一般需求,也达到了在小容量芯片中应用的开发要求。由于没有采用占先式的任务调度,除开全程相关的个别任务的一些局部变量外,其他局部变量已经不存在覆盖关系,由于是任务主动放弃CPU控制权,对于个别需要保护的变量单独进行处理也变得容易。在系统中,全程不需要反复地开关中断,实时性能也很好。对个别时序要求严格的外设(如DSl8820)除外。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)








评论