基于凌阳16位单片机的智能车设计

引言
本文引用地址:https://www.eepw.com.cn/article/172517.htm 轮式小车是智能小车机械结构的主体部分,由车身、轮子、变速器、传动轴等结构部件构成。轮式小车还包括提供动力的驱动器,用来收集智能小车的自身状态信息或外部环境信息,并对多传感器的数据进行分析、融合,动态调整小车的运动状态,实现在一定条件下的自主行驶。
硬件设计
图1是智能车总体的设计方案及组成原理。微处理器采用了16位SPCE061A单片机,以此为核心设计了红外传感模块、电机驱动模块、PI控制器及相关的显示指示模块。
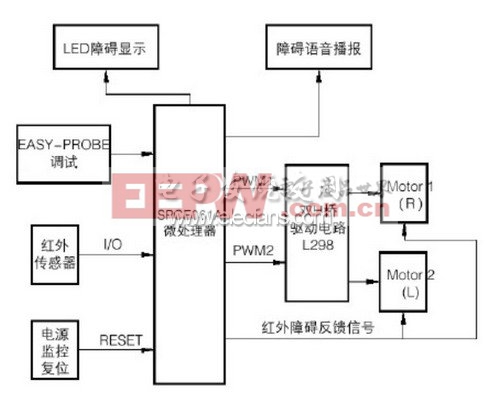
图1 智能车总体的设计方案
轮式小车机械结构的设计
智能小车机械结构包括车轮、车身、转向舵机、驱动器和各种传动机构等。小车车身主体由2mm厚的有机玻璃组成。小车有三个车轮,其中后面的两轮为驱动轮,分别有独立的直流电机驱动。
若直接将直流电机输出轴连接小车的轮胎,会出现电机的转矩偏小、小车的动力差等缺点,采用PWM直流电机调速方法又会使电机的输出转矩在原有压降的基础上又有所下降。为了解决转矩速度之间的矛盾,笔者设计了二级定轴轮系转动减速装置,其结构示意图如图2所示。
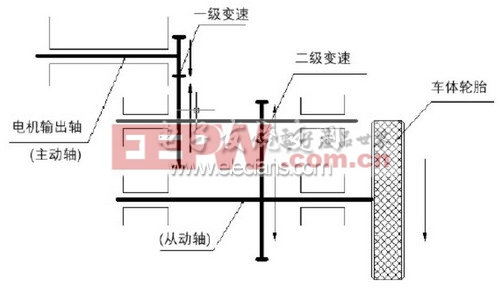
图2 减速机构原理图
其中齿轮均为圆柱直齿轮。若主动轴用1表示,末轮以K表示,轮速为ω,圆柱直齿轮啮合次数为m,则上述轮系机构的传动比ilk为

(1)
此处电机输出轴是主动轴,车体轮胎是从动轴。
其中一级变速主动轮齿数Z1主=11,从动轮齿数Z1从=35;二级变速主动轮齿数Z2主=11,从动轮齿数Z2从=40;圆柱直齿轮啮合次数为m=2。可以计算出ilk=11.5。












评论