基于凌阳16位单片机的智能车设计
常规的智能车一般引入输出电机的转速作为负反馈行程单闭环调速系统。虽然这个闭环具有较强的抗干扰性能,转速调节器采用常规PI调节器,但是在系统中静差仍然存在,即在PI控制调节器下稳态误差只能减少而不可能消除。因此,单闭环调速系统控制效果和性能对给定稳压源和速度检测元件的精度具有依赖性。
直流电机在全压启动时会产生很大的冲击电流,这对电机的换向不利,实际中表现为小车在变向或倒车时控制不及时,有较大的延迟时间。引入自动限制电枢电流的电流环负反馈对解决此问题是有效的。为了使转速和电流两种负反馈分别起作用,在系统中设置两个调节器, 分别调节转速和电流。二者之间串级联接。把转速调节器的输出当作电流调节器的输入。从闭环结构上看,电流环在里面,转速环在外面,形成了转速、电流双闭环调速系统,如图5所示。
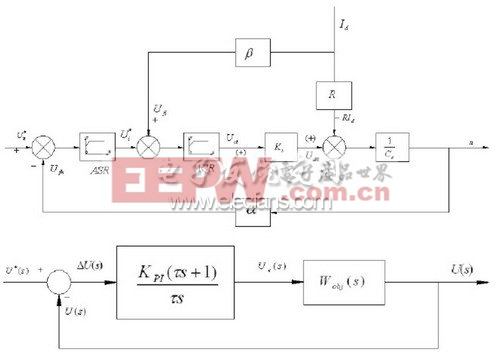
图5 转速电流双闭环调速系统
其中,β为电流反馈系数,n为转速, α为转速反馈系数。ASR为转速比例积分调节器,用来实现转速无静差。ACR为电流比例积分调节器,用来实现电流无静差。当两个调节器都不饱和时,双闭环调速系统在稳态工作点上,PI调节器的稳态输出量与输入量无关。












评论