基于CAN总线的87C196CA单片机串行通讯的应用

1 前言
本文引用地址:https://www.eepw.com.cn/article/171909.htmCAN 是国际上应用很广泛的一种现场总线,MCS96 系列单片机是目前在工业界推广应用较广泛的嵌入式控制器,其87C196CA 单片机内核本身带有CAN 控制器,支持标准和扩展的信息帧,即遵循CAN2.0A 和CAN2.0B 协议。由此而构成的CAN 总线支持分布式控制和实时控制,其串行通信方式灵活可靠,传输距离较远。由于CAN 总线具有通信速率高、工作可靠性高、现场抗干扰能力强、网络连接方便和性能价格比高等优点,在汽车发动机控制部件、汽车抗滑系统、工业自动化、机床、电梯控制等领域得到了较为广泛的应用。
2 硬件构成
2. 1 CAN 总线连接
基于CAN 总线的两个87C196 单片机网络联接时,分别将单片机的CAN接收、发送两根线通过PCA82C250 CAN总线收发器联接到CAN总线上,构成多微控制器CAN总线连接。通信介质可以是双绞线、同轴电缆或光纤,其总线连接如图1 所示。
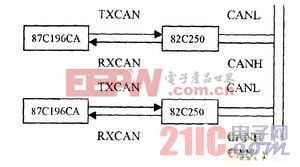
图1 CAN 总线连接
该网络最高通信速率为1Mbit/s ,当传输速率为5Kbit/s时,最大通信距离可达10Km。在其CAN 总线上可挂接多达110 个网络节点,而网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息。其数据传输和接收可以是点对点、一点对多点或全局广播等方式进行。
2. 2 87C196CA 单片机
87C196CA 是集成CAN2.0B总线控制器的高性能16 位微处理器,特别适用于现场实时事件控制和分布式控制。片内的CAN 控制器与Intel 82527独立CAN 控制器在软件上是兼容的,每个CAN 控制器的输入、输出引脚由二根双绞线联接到CAN总线上。CAN 控制器由一个输入引脚(RXCAN) 、一个输出引脚( TXCAN) 、控制和状态寄存器,错误探测和管理逻辑组成。图2 为CAN 控制器方框图。
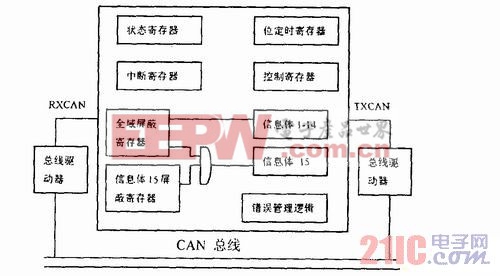
图2 CAN 控制器方框图












评论