基于单片机的开关磁阻电机驱动系统设计

1 引言
本文引用地址:https://www.eepw.com.cn/article/170752.htm开关磁阻电动机是磁阻电动机与电子开关驱动控制器组成的控制装置,又称开关磁阻电机驱动系统(Switched Reluctance Motor drive,简称SRD)。电机结构简单坚固,运行可靠,系统具有启动转矩高、启动电流低、调速范围宽、运行效率高,特别适用于频繁启停及正反转运行,使得SRD成为交,直流电机驱动系统以及无刷直流电机驱动系统的强有力竞争者。目前,SRD已用于多个领域,如:电动车驱动、家用电器、伺服与调速系统等许多领域。
本文设计了一个以80C196单片机为控制核心的SRD的控制系统,充分利用了SRD电机控制方式灵活的特点,采用数字化控制系统对SR电机进行控制,简化了硬件电路,提高了系统的可靠性。
2 SR电机工作原理
SR电机运行原理遵循磁阻最小原理——磁通总要沿着磁阻最小的路径闭合,因磁场扭曲而产生切向的磁拉力,当具有一定形状的铁心在移动到最小磁阻位置时,必使自己的主轴线与磁场的轴线重合。典型的SR电机结构原理如图1所示。
具体过程如下:当A相绕组电流控制开关S1,S2闭合时,A相励磁,所产生的磁场力使转子旋转到转子轴线与定子轴线重合的位置,从而产生磁阻性质的电磁转矩。顺序给A-B-C-D相绕组通电(B、C、D各相绕组在图中未画出),则转子便按逆时针方向连续转动起来。反之,依次给B-A-D-C相绕组通电,则转子会按顺时针方向转动。

图1 SR电机结构原理图
由于是磁阻性质的电磁转矩,SR电机的转向与相绕组的电流方向无关,仅取决于相绕组的通电顺序,这使得能够简化功率变化器电路,当S1或S2闭合时,A相绕组从电源上吸收电能,而S1或S2断开时,绕组电流通过二极管VD1、VD2将剩余能量回馈给电源,因此SR电机具有能量回馈的特点,系统效率高。
2 SRD系统硬件设计
2.1系统基本组成
SRD系统主要由四部分组成:开关磁阻电机、功率变换器、控制器及传感器。它们之间的关系如图2所示。
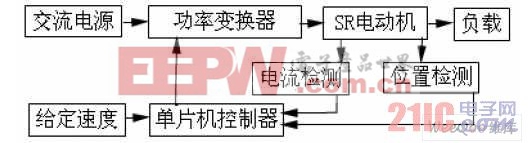
图2 SRD基本组成结构图
SR电动机是整个系统的执行部件,采用双凸极结构的磁阻的电机、功率变换器向SR电动机提供运转所需要的能量,位置检测器是转子位置及速度等信号的提供者,控制器是系统的中枢,它综合处理速度指令、速度反馈信号及电流传感器、位置传感器的反馈信号,从而控制功率变换器中主开关器件的工作状态,实现对SR电动机运行状态的最终控制。











评论