基于单片机的开关磁阻电机驱动系统设计
2.2 功率变换电路
本文采用的是四相8/6极磁阻电动机作为系统控制的实验平台,功率电路采用H型的功率电路,如图3所示。A,B,C,D为SR电机的四相绕组,VD1~VD4为续流二极管,AB,CB,CD,AD两相同时导通,循环导通工作。若V1,V3同时导通,则A,B相通电。若V1关断,V2闭合,则A相关断,C相开始导通,此时,A相绕组将通过二极管VD1续流,C相绕组也将构成回路,使B相电流增大,中性点电位必然增高,促使A相续流迅速衰减,强行换相。紧接着关断V1,开通V4,则C,D相导通,依次循环导通,电机就连续工作起来。其*率开关用PWM控制信号通过驱动电路来进行控制其通断。

图3 功率电路原理图
2.3控制电路结构
控制电路部分主要包括80C196单片机,角度位置检测电路,显示键盘电路以及接口电路。在控制电路中,单片机是核心,负责执行指令、处理数据。角度位置检测电路通过光电传感器检测转子位置,并将位置信号处理好后送给功率变换器和显示电路部分显示系统信息。8279接口电路负责CPU和显示键盘部分的信息交换。系统处于工作状态时,用户通过键盘给定转速,单片机接收到转速指令后通过与实际测的速度相比较,通过内部设定的控制算法输出一个占空比可调的PWM信号,这个PWM信号使得在SR电机的相绕组两端电压的变化,从而实现调速的目的。
3 SRD系统软件设计
系统软件主要由单片机处理软件和PC上位机控制软件组成。
3.1 单片机软件设计
开关磁阻电机控制软件以控制系统硬件为依托。完成对位置信号,输入给定信号及当前运行状态的检测,进行判断和计算,输出合适的电流控制与换相控制信号。它由前台程序和后台程序组成,如图4所示。其中后台程序包括初始化程序,键盘扫描程序,调速控制程序,显示程序,闲时循环程序。前台程序由四个中断程序组成,它们位置中断程序、软件定时器中断,外部中断及串行口中断程序。
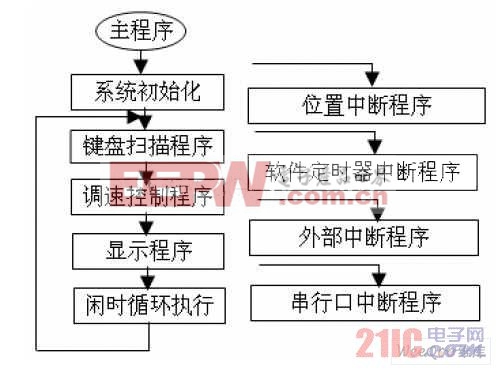
初始化程序完成有关单元初始化,选择外部接口的工作方式,CPU各部分功能部件初始化,开启中断等,使整个系统处于准备运行状态。键盘扫描程序检查键盘的输入情况,并进行相应的软件去抖动处理,当确实有键按下时进行相应的判断,如正转、反转、制动。调速控制程序根据给定速度,并根据电机的状态完成电机的启动与制动,当在运行时根据速度的偏差输出相应的PWM信号。显示程序主要完成电机在面板控制方式下的信息显示。电机启动前闪烁显示给定转速,启动后给定实际转速,运行过程中若出现故障,则显示故障性质代码。闲时循环程序由电源检测程序、硬件故障检测、故障处理及对上位机的命令分析程序组成。
位置中断程序即两个位置传感器输出的方波信号的上升沿和下降沿均引起中断,即电机每转过15°就产生依次中断。该程序主要完成运行速度检测、换相控制以及运行模式的切换。定时器中断实现主循环定时,电流采样,电流斩波等功能。而外部中断程序则实现外部键盘输入功能。串行口中断则是实现上位机与单片机之间的通信。
系统的工作过程如下:当单片机接到启动命令时,,在检测系统状态一切正常的情况下,根据位置传感器所提供的转子的位置信号,按启动逻辑给出相应的输出信号,该信号通过功率变换器向电机绕组供电,使电机开始转动。当转子转过一定角度时,控制电路根据位置传感器信号的变化通过功率变换器使电动机通电相位改变。运行时,根据给定速度与实际速度之间的误差输出占空比可以调节的PWM控制信号。当操作命令改变时,如反转,停车,制动时,控制电路再次改变工作逻辑,通过功率变换器使电动机实现操作要求。若在运行中出现故障情况,控制电路将通过关断功率变换器实现保护,并且通过显示电路显示故障代码。











评论