基于精确定位的井下运输信集闭系统的研究

摘要:文章借鉴现有信集闭系统的研究成果,并参考煤矿实际运输情况,提出并完成了基于精确定位的井下运输信集闭系统的研究。精确定位系统通过测量机车任意时刻下的加速度值,进而计算出电机车的运动速度和位置,实现定位功能。信集闭系统以西门子PLC、AVR单片机为控制核心,充分利用了单片机和PLC的控制优点,提高了系统的定位精度,实现了实时性和准确性控制。
关键词:信集闭系统;PLC;单片机;以太网通信;机车精确定位
0 引言
电机车是煤矿井下重要的运输设备之一,担负着煤炭、矸石、人员和物料的运输任务,既对矿井生产效率影响较大,又存在着较大的安全隐患。因此,对机车运输的监控在煤矿生产综合监控中占有重要地位。
本论文设计的基于精确定位的井下运输信集闭系统,机车定位精度高、且能实现井下电机车运输系统信号集中闭塞,并能够通过数据传输通道进行数据通讯,保证系统具有更高的可靠性。
1 系统总体方案设计
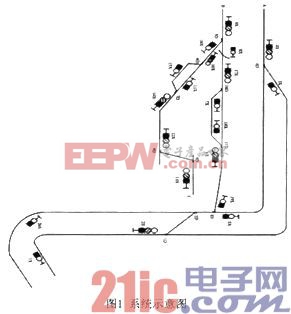
图1为实际系统示意图,有多条进路,井下环境复杂。为实现对电机车运输的自动化调度,系统必须兼备控制与检测两种基本功能,控制功能指在收到调度员包含车号及机车行驶的起始终了地址指令后,通过判断进路是否可以开放,自动跟踪进路并自动控制开放信号机。检测功能则需要分站将机车的精确位置、速度、信号机开放颜色及道岔位置反馈给主站上位机。
本设计把系统分为三大部分:
(1)机车精确定位系统。监测电机车车号、位置,及时了解机车运行状态;
(2)信集闭系统。PLC作为主控器,主要有检测、控制和通讯功能;
(3)上位机监控系统。显示行车位置,调度机车,控制行车区间。
2 机车精确定位系统
该系统采用基于捷联惯性导航定位方法,取代了原有的轨道电路及传感器系统,既能监测电机车车号、位置,又能及时了解机车运行状态,对于煤矿安全生产和提高工作效率就显得十分重要。
2.1 机车精确定位系统的结构
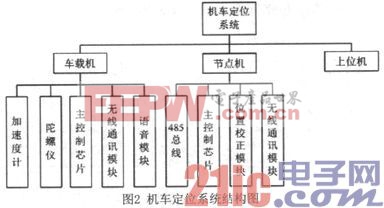
机车定位系统利用固连在电机车车载机上的加速度传感器和陀螺仪,采用捷联惯性导航算法,通过测量电机车任意时刻下的加速度值和角速度值,通过积分、微分、矩阵乘法等运算计算出物体姿态、速度和位移,进而确定电机车的速度及位置,实现定位功能。与传统的传感器系统相比,可靠性好、灵敏度高,且装载语音通信功能,能方便及时地与调度沟通。结构图如图2所示,系统主要由车载机、节点机、上位机三部分组成。
2.2 机车精确定位系统原理
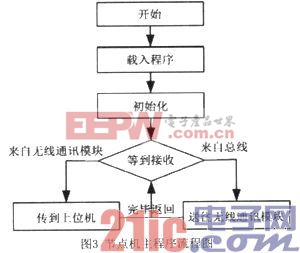
节点机首先对单片机端口、各寄存器功能、语音芯片等可编程芯片进行初始化。然后等待接收数据并判断数据来源,执行相应的任务。节点机主程序如图3所示。












评论